
重要硬件: 基于dsPIC30F系列MCU
控制板電源:反激式開關電源,輸出4組獨立電源.
驅動形式:采用250功率驅動光藕,+15V,-3.3V負電壓
可驅動IGBT,MOSFET
輸出方式:單級性,H橋工頻變壓器輸出.
反饋方式:交流采樣反饋.
軟件設計: 采用SVPWM,單相空間矢量調制,優化開關控制時序.
控制思想: 內模重復控制原理+電壓定時滯環+PI控制技術.
設計結果: 基本無頻率誤差,空載和滿載電壓相差不超過2%,空載和滿載順間轉換電壓相差不超過2%,并能在2個周期內定.
數字電源的設計與制作
全部回復(69)
正序查看
倒序查看
 500) {this.resized=true; this.width=500; this.alt='這是一張縮略圖,點擊可放大。\n按住CTRL,滾動鼠標滾輪可自由縮放';this.style.cursor='hand'}" onclick="if(!this.resized) {return true;} else {window.open('http://u.dianyuan.com/bbs/u/69/408501220613027.jpg');}" onmousewheel="return imgzoom(this);">
500) {this.resized=true; this.width=500; this.alt='這是一張縮略圖,點擊可放大。\n按住CTRL,滾動鼠標滾輪可自由縮放';this.style.cursor='hand'}" onclick="if(!this.resized) {return true;} else {window.open('http://u.dianyuan.com/bbs/u/69/408501220613027.jpg');}" onmousewheel="return imgzoom(this);">
 500) {this.resized=true; this.width=500; this.alt='這是一張縮略圖,點擊可放大。\n按住CTRL,滾動鼠標滾輪可自由縮放';this.style.cursor='hand'}" onclick="if(!this.resized) {return true;} else {window.open('http://u.dianyuan.com/bbs/u/69/408501220613395.jpg');}" onmousewheel="return imgzoom(this);">
500) {this.resized=true; this.width=500; this.alt='這是一張縮略圖,點擊可放大。\n按住CTRL,滾動鼠標滾輪可自由縮放';this.style.cursor='hand'}" onclick="if(!this.resized) {return true;} else {window.open('http://u.dianyuan.com/bbs/u/69/408501220613395.jpg');}" onmousewheel="return imgzoom(this);">
 500) {this.resized=true; this.width=500; this.alt='這是一張縮略圖,點擊可放大。\n按住CTRL,滾動鼠標滾輪可自由縮放';this.style.cursor='hand'}" onclick="if(!this.resized) {return true;} else {window.open('http://u.dianyuan.com/bbs/u/69/408501220613409.jpg');}" onmousewheel="return imgzoom(this);">
500) {this.resized=true; this.width=500; this.alt='這是一張縮略圖,點擊可放大。\n按住CTRL,滾動鼠標滾輪可自由縮放';this.style.cursor='hand'}" onclick="if(!this.resized) {return true;} else {window.open('http://u.dianyuan.com/bbs/u/69/408501220613409.jpg');}" onmousewheel="return imgzoom(this);"> 0
回復
@zack
[圖片]500){this.resized=true;this.width=500;this.alt='這是一張縮略圖,點擊可放大。\n按住CTRL,滾動鼠標滾輪可自由縮放';this.style.cursor='hand'}"onclick="if(!this.resized){returntrue;}else{window.open('http://u.dianyuan.com/bbs/u/69/408501220613027.jpg');}"onmousewheel="returnimgzoom(this);">[圖片]500){this.resized=true;this.width=500;this.alt='這是一張縮略圖,點擊可放大。\n按住CTRL,滾動鼠標滾輪可自由縮放';this.style.cursor='hand'}"onclick="if(!this.resized){returntrue;}else{window.open('http://u.dianyuan.com/bbs/u/69/408501220613395.jpg');}"onmousewheel="returnimgzoom(this);">[圖片]500){this.resized=true;this.width=500;this.alt='這是一張縮略圖,點擊可放大。\n按住CTRL,滾動鼠標滾輪可自由縮放';this.style.cursor='hand'}"onclick="if(!this.resized){returntrue;}else{window.open('http://u.dianyuan.com/bbs/u/69/408501220613409.jpg');}"onmousewheel="returnimgzoom(this);">
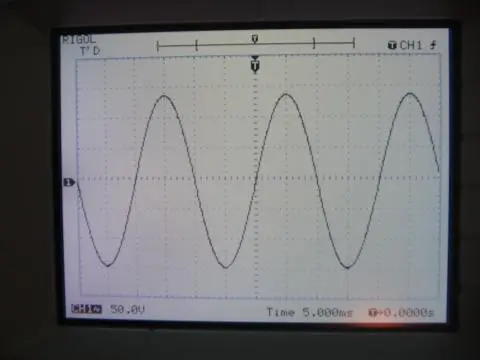
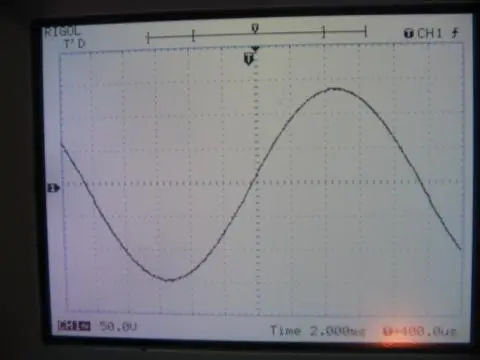
以上是帶阻性負載的波形.下圖是電壓滯環的控制波形.
 500) {this.resized=true; this.width=500; this.alt='這是一張縮略圖,點擊可放大。\n按住CTRL,滾動鼠標滾輪可自由縮放';this.style.cursor='hand'}" onclick="if(!this.resized) {return true;} else {window.open('http://u.dianyuan.com/bbs/u/69/408501220613592.jpg');}" onmousewheel="return imgzoom(this);">
500) {this.resized=true; this.width=500; this.alt='這是一張縮略圖,點擊可放大。\n按住CTRL,滾動鼠標滾輪可自由縮放';this.style.cursor='hand'}" onclick="if(!this.resized) {return true;} else {window.open('http://u.dianyuan.com/bbs/u/69/408501220613592.jpg');}" onmousewheel="return imgzoom(this);">
500) {this.resized=true; this.width=500; this.alt='這是一張縮略圖,點擊可放大。\n按住CTRL,滾動鼠標滾輪可自由縮放';this.style.cursor='hand'}" onclick="if(!this.resized) {return true;} else {window.open('http://u.dianyuan.com/bbs/u/69/408501220613592.jpg');}" onmousewheel="return imgzoom(this);"> 0
回復
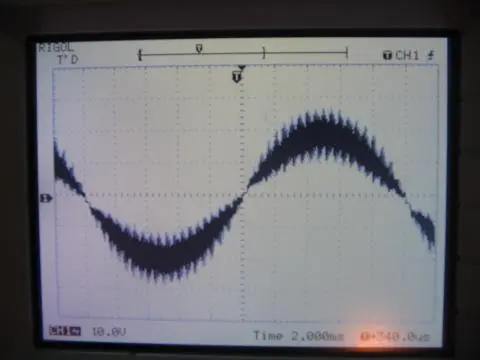
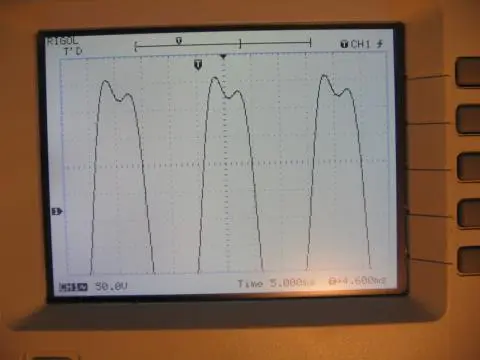
同時也做了一個試驗,在50HZ的基波上疊加150HZ的3次諧波,
諧波幅值為基波的10%.下圖為輸出波形,表明滯環跟蹤良好.
 500) {this.resized=true; this.width=500; this.alt='這是一張縮略圖,點擊可放大。\n按住CTRL,滾動鼠標滾輪可自由縮放';this.style.cursor='hand'}" onclick="if(!this.resized) {return true;} else {window.open('http://u.dianyuan.com/bbs/u/69/408501220614104.jpg');}" onmousewheel="return imgzoom(this);">
500) {this.resized=true; this.width=500; this.alt='這是一張縮略圖,點擊可放大。\n按住CTRL,滾動鼠標滾輪可自由縮放';this.style.cursor='hand'}" onclick="if(!this.resized) {return true;} else {window.open('http://u.dianyuan.com/bbs/u/69/408501220614104.jpg');}" onmousewheel="return imgzoom(this);">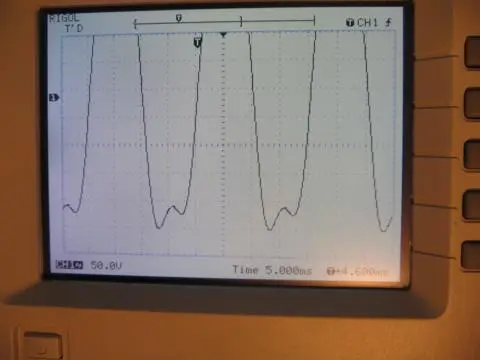 500) {this.resized=true; this.width=500; this.alt='這是一張縮略圖,點擊可放大。\n按住CTRL,滾動鼠標滾輪可自由縮放';this.style.cursor='hand'}" onclick="if(!this.resized) {return true;} else {window.open('http://u.dianyuan.com/bbs/u/69/408501220614117.jpg');}" onmousewheel="return imgzoom(this);">
500) {this.resized=true; this.width=500; this.alt='這是一張縮略圖,點擊可放大。\n按住CTRL,滾動鼠標滾輪可自由縮放';this.style.cursor='hand'}" onclick="if(!this.resized) {return true;} else {window.open('http://u.dianyuan.com/bbs/u/69/408501220614117.jpg');}" onmousewheel="return imgzoom(this);">
諧波幅值為基波的10%.下圖為輸出波形,表明滯環跟蹤良好.
500) {this.resized=true; this.width=500; this.alt='這是一張縮略圖,點擊可放大。\n按住CTRL,滾動鼠標滾輪可自由縮放';this.style.cursor='hand'}" onclick="if(!this.resized) {return true;} else {window.open('http://u.dianyuan.com/bbs/u/69/408501220614104.jpg');}" onmousewheel="return imgzoom(this);">500) {this.resized=true; this.width=500; this.alt='這是一張縮略圖,點擊可放大。\n按住CTRL,滾動鼠標滾輪可自由縮放';this.style.cursor='hand'}" onclick="if(!this.resized) {return true;} else {window.open('http://u.dianyuan.com/bbs/u/69/408501220614117.jpg');}" onmousewheel="return imgzoom(this);"> 0
回復
目前存在一些問題,希望得到有關朋友的支持.
經過系統的初步測試,電壓重復控制原理對于電壓波形的失真有較好的補償作用.
并且靜態跟隨精度高,動態響應快,不失為是一個比較理想的數字電源平臺.
當然主芯片可降為30F2020,保持30MIP的運算速度,但價格可以做到20元以下.
對于中高檔的應用場合比較樂觀.
硬件上的問題:
本16位數字電源平臺直流母線電源,采用60V直流供電. 但是做一個可變頻的、高性能大功率電源,前級需要高功率因素的PFC電路.并且,要得到60V的直流電壓,需要采用3525全橋軟開關變換來得到.
這個是目前遇到的一些困難.希望同行指點一下意見!!
經過系統的初步測試,電壓重復控制原理對于電壓波形的失真有較好的補償作用.
并且靜態跟隨精度高,動態響應快,不失為是一個比較理想的數字電源平臺.
當然主芯片可降為30F2020,保持30MIP的運算速度,但價格可以做到20元以下.
對于中高檔的應用場合比較樂觀.
硬件上的問題:
本16位數字電源平臺直流母線電源,采用60V直流供電. 但是做一個可變頻的、高性能大功率電源,前級需要高功率因素的PFC電路.并且,要得到60V的直流電壓,需要采用3525全橋軟開關變換來得到.
這個是目前遇到的一些困難.希望同行指點一下意見!!
0
回復
@zack
同時也做了一個試驗,在50HZ的基波上疊加150HZ的3次諧波,諧波幅值為基波的10%.下圖為輸出波形,表明滯環跟蹤良好.[圖片]500){this.resized=true;this.width=500;this.alt='這是一張縮略圖,點擊可放大。\n按住CTRL,滾動鼠標滾輪可自由縮放';this.style.cursor='hand'}"onclick="if(!this.resized){returntrue;}else{window.open('http://u.dianyuan.com/bbs/u/69/408501220614104.jpg');}"onmousewheel="returnimgzoom(this);">[圖片]500){this.resized=true;this.width=500;this.alt='這是一張縮略圖,點擊可放大。\n按住CTRL,滾動鼠標滾輪可自由縮放';this.style.cursor='hand'}"onclick="if(!this.resized){returntrue;}else{window.open('http://u.dianyuan.com/bbs/u/69/408501220614117.jpg');}"onmousewheel="returnimgzoom(this);">
 500) {this.resized=true; this.width=500; this.alt='這是一張縮略圖,點擊可放大。\n按住CTRL,滾動鼠標滾輪可自由縮放';this.style.cursor='hand'}" onclick="if(!this.resized) {return true;} else {window.open('http://u.dianyuan.com/bbs/u/69/408501220615615.jpg');}" onmousewheel="return imgzoom(this);">
500) {this.resized=true; this.width=500; this.alt='這是一張縮略圖,點擊可放大。\n按住CTRL,滾動鼠標滾輪可自由縮放';this.style.cursor='hand'}" onclick="if(!this.resized) {return true;} else {window.open('http://u.dianyuan.com/bbs/u/69/408501220615615.jpg');}" onmousewheel="return imgzoom(this);"> 0
回復
@xzszrs
好就沒見你來了,一上來就是精品,軟硬件都是頂級的配置!強!只是本人認為,應該還能做出更好的性能,如空載和滿載電壓相差不超過2%,個人認為這個指標對于這個軟硬件都是頂級的配置,控制策略也很先進來說應該還可以提高的,理論上來講,光是PI控制就能補償系統的靜差,在電源上即負載特性.2%是不是標的比較保守,想知道樣機能達到多少?還有請教下重復控制相比與實時控制波形能保持更完美是不是犧牲了穩壓和瞬太響應.當然空載和滿載電壓相差不超過2%這已經是很好的指標了,足以勝任任何用電場合和負載,只是出于討論和研究才提出這些,并不是吹毛求疵.
鐘先生久違了,一切都好嗎?很久沒有來這里了,呵呵,你已經是總工程師了,先恭喜你哦.
討論一下,你提出的問題吧.
1,現在還稱不上樣機,我只是做了一個100瓦的模擬實驗,把精力基本都放在控制算法的研究上.加退負載的時候示波器基本看不到波動.2%的動態響應是最大值,是通過MATLAB仿真得到的.
2,重復控制原VS時實比較.在數字控制系統中,從輸出環節、整形濾波反饋環節到AD采樣環節,都是存在一定量的延時.也就是說,當前的輸出量,不可能立刻反饋到我的AD結果,不能實現真正的時實比較,這樣來說對于純硬件電路也是有一定量的滯厚的.重復控制源于控制理論中的內模原理.
討論一下,你提出的問題吧.
1,現在還稱不上樣機,我只是做了一個100瓦的模擬實驗,把精力基本都放在控制算法的研究上.加退負載的時候示波器基本看不到波動.2%的動態響應是最大值,是通過MATLAB仿真得到的.
2,重復控制原VS時實比較.在數字控制系統中,從輸出環節、整形濾波反饋環節到AD采樣環節,都是存在一定量的延時.也就是說,當前的輸出量,不可能立刻反饋到我的AD結果,不能實現真正的時實比較,這樣來說對于純硬件電路也是有一定量的滯厚的.重復控制源于控制理論中的內模原理.
0
回復
@zack
鐘先生久違了,一切都好嗎?很久沒有來這里了,呵呵,你已經是總工程師了,先恭喜你哦.討論一下,你提出的問題吧.1,現在還稱不上樣機,我只是做了一個100瓦的模擬實驗,把精力基本都放在控制算法的研究上.加退負載的時候示波器基本看不到波動.2%的動態響應是最大值,是通過MATLAB仿真得到的.2,重復控制原VS時實比較.在數字控制系統中,從輸出環節、整形濾波反饋環節到AD采樣環節,都是存在一定量的延時.也就是說,當前的輸出量,不可能立刻反饋到我的AD結果,不能實現真正的時實比較,這樣來說對于純硬件電路也是有一定量的滯厚的.重復控制源于控制理論中的內模原理.
重復控制用于逆變器的波形校正時,它的基本思想是假設前一個基波周期中出現的
波形畸變將會在下一個基波周期的同一時間重復出現,在此假設條件下,控制器
根據每個開關周期給定信號與反饋信號的誤差來確定所需的校正信號,然后在下
一個基波周期的同一時間將此信號疊加到原控制信號上,以消除以后各基波周期
中將出現的重復畸變.因此,重復控制只對產生波形畸變的周期性擾動有抑
制作用,但對非周期性擾動卻不能抑制.然而實際中,產生逆變器波形畸變的擾動
大部分都是周期性的,死區與負載所產生的擾動就是周期性擾動,因此重復控制
技術可以同時對死區與負載引起的波形畸變有較好的校正作用.現在還沒有帶大
量的感性負載做試驗,把重心轉移到解決目前困繞我的前級問題.
波形畸變將會在下一個基波周期的同一時間重復出現,在此假設條件下,控制器
根據每個開關周期給定信號與反饋信號的誤差來確定所需的校正信號,然后在下
一個基波周期的同一時間將此信號疊加到原控制信號上,以消除以后各基波周期
中將出現的重復畸變.因此,重復控制只對產生波形畸變的周期性擾動有抑
制作用,但對非周期性擾動卻不能抑制.然而實際中,產生逆變器波形畸變的擾動
大部分都是周期性的,死區與負載所產生的擾動就是周期性擾動,因此重復控制
技術可以同時對死區與負載引起的波形畸變有較好的校正作用.現在還沒有帶大
量的感性負載做試驗,把重心轉移到解決目前困繞我的前級問題.
0
回復
@zack
目前存在一些問題,希望得到有關朋友的支持.經過系統的初步測試,電壓重復控制原理對于電壓波形的失真有較好的補償作用.并且靜態跟隨精度高,動態響應快,不失為是一個比較理想的數字電源平臺.當然主芯片可降為30F2020,保持30MIP的運算速度,但價格可以做到20元以下.對于中高檔的應用場合比較樂觀.硬件上的問題:本16位數字電源平臺直流母線電源,采用60V直流供電.但是做一個可變頻的、高性能大功率電源,前級需要高功率因素的PFC電路.并且,要得到60V的直流電壓,需要采用3525全橋軟開關變換來得到.這個是目前遇到的一些困難.希望同行指點一下意見!!
3525做成全橋軟開關比較困難,可慮專用的全橋移相軟開關控制芯片如UC3875/3895/3879.
0
回復
@我愛思思
我們公司也應用過單片機控制的逆變電源,但是感覺速度跟不上.主要是反饋控制跟不上來.不過你用DSP速度應該提高了不少,但成本也可能高了.我想這種數字電源如果用在固定頻率逆變中,應該競爭優勢不大.但是如果在變頻電源中,應該是很好的方案.
目前,單片機或者是DSP用來設計各種逆變電源的關鍵并不在于硬件設計,在UPS
設計上有很多成熟的電路可以參考.核心在于控制算法的編程與實現.泛泛地說,就是在編寫DSP逆變程序的時候要對整個逆變器的輸出級和采樣反饋有個數學模
型的認識,再結合控制理論來實現最優化的控制方案.相比硬件設計來說純數字
控制方案有:算法可以時實調整、可實現對電壓電流的跟蹤反饋進行補償等等...
逆變技術可應用延伸出很多種應用,本人有很多欠缺,也在一直努力研究.
歡迎大家PK.
設計上有很多成熟的電路可以參考.核心在于控制算法的編程與實現.泛泛地說,就是在編寫DSP逆變程序的時候要對整個逆變器的輸出級和采樣反饋有個數學模
型的認識,再結合控制理論來實現最優化的控制方案.相比硬件設計來說純數字
控制方案有:算法可以時實調整、可實現對電壓電流的跟蹤反饋進行補償等等...
逆變技術可應用延伸出很多種應用,本人有很多欠缺,也在一直努力研究.
歡迎大家PK.
0
回復
@zack
目前存在一些問題,希望得到有關朋友的支持.經過系統的初步測試,電壓重復控制原理對于電壓波形的失真有較好的補償作用.并且靜態跟隨精度高,動態響應快,不失為是一個比較理想的數字電源平臺.當然主芯片可降為30F2020,保持30MIP的運算速度,但價格可以做到20元以下.對于中高檔的應用場合比較樂觀.硬件上的問題:本16位數字電源平臺直流母線電源,采用60V直流供電.但是做一個可變頻的、高性能大功率電源,前級需要高功率因素的PFC電路.并且,要得到60V的直流電壓,需要采用3525全橋軟開關變換來得到.這個是目前遇到的一些困難.希望同行指點一下意見!!
你的數字電源平臺是用220v交流電供電的嗎?如果是的話大功率pfc的造價比你的后級還要貴.看得出你對開關電源了解不是很深
0
回復
@zack
目前存在一些問題,希望得到有關朋友的支持.經過系統的初步測試,電壓重復控制原理對于電壓波形的失真有較好的補償作用.并且靜態跟隨精度高,動態響應快,不失為是一個比較理想的數字電源平臺.當然主芯片可降為30F2020,保持30MIP的運算速度,但價格可以做到20元以下.對于中高檔的應用場合比較樂觀.硬件上的問題:本16位數字電源平臺直流母線電源,采用60V直流供電.但是做一個可變頻的、高性能大功率電源,前級需要高功率因素的PFC電路.并且,要得到60V的直流電壓,需要采用3525全橋軟開關變換來得到.這個是目前遇到的一些困難.希望同行指點一下意見!!
你要做一個變頻電源為何要采用60V,如果是PFC升到400V再直接采用一個橋逆變輸出,不就可以了嗎?
我很想學采用30F1010來做數字電源,但在價格上好像以TMS320F28015一樣,所以想采用TMS320F28015來做,你所說的30F2020能20元搞定嗎?
我之前看過資料30F1010可以實現交錯式PFC電路控制,采用這種PFC控制可以輕松做到2KW以上,但不知還會不會有多余的PWM口來做輸出橋控制.
我采用ATmaga48做過12V輸入220V輸出的逆變器,單片實現DC-DC-AC控制,輸出最然采用8位PWM, 但經過軟優化可實現精度達12位半,采用10位AD對DC電壓采樣,SPWM算法用了13位然后將計算結果按特定計算分配到8位PWM輸出.
也許我們有一點共同研究方向,希望一起學習共進.
我很想學采用30F1010來做數字電源,但在價格上好像以TMS320F28015一樣,所以想采用TMS320F28015來做,你所說的30F2020能20元搞定嗎?
我之前看過資料30F1010可以實現交錯式PFC電路控制,采用這種PFC控制可以輕松做到2KW以上,但不知還會不會有多余的PWM口來做輸出橋控制.
我采用ATmaga48做過12V輸入220V輸出的逆變器,單片實現DC-DC-AC控制,輸出最然采用8位PWM, 但經過軟優化可實現精度達12位半,采用10位AD對DC電壓采樣,SPWM算法用了13位然后將計算結果按特定計算分配到8位PWM輸出.
也許我們有一點共同研究方向,希望一起學習共進.
0
回復
@abing
你要做一個變頻電源為何要采用60V,如果是PFC升到400V再直接采用一個橋逆變輸出,不就可以了嗎?我很想學采用30F1010來做數字電源,但在價格上好像以TMS320F28015一樣,所以想采用TMS320F28015來做,你所說的30F2020能20元搞定嗎?我之前看過資料30F1010可以實現交錯式PFC電路控制,采用這種PFC控制可以輕松做到2KW以上,但不知還會不會有多余的PWM口來做輸出橋控制.我采用ATmaga48做過12V輸入220V輸出的逆變器,單片實現DC-DC-AC控制,輸出最然采用8位PWM,但經過軟優化可實現精度達12位半,采用10位AD對DC電壓采樣,SPWM算法用了13位然后將計算結果按特定計算分配到8位PWM輸出.也許我們有一點共同研究方向,希望一起學習共進.
你好.最近比較忙,沒有回復話題,抱歉.
1,PFC到400V可以. 為什么用60V,因為我順便想做個充電電源.
2,30F2020在價格20+,看量定吧. TI 的確是個好東西,開發也很方便,28015看來
價格不菲.
3,采用直流采樣逆變做不到本文的控制效果,關鍵是在波形的實時調整性能上.
當然,作為一般化的逆變電源,直流采樣可以在一定范圍內滿足要求.
再,AVR做電源尤其要注意PCB設計的干擾問題,抗干擾沒有PIC強.并且破解非常
容易,費用低廉.
1,PFC到400V可以. 為什么用60V,因為我順便想做個充電電源.
2,30F2020在價格20+,看量定吧. TI 的確是個好東西,開發也很方便,28015看來
價格不菲.
3,采用直流采樣逆變做不到本文的控制效果,關鍵是在波形的實時調整性能上.
當然,作為一般化的逆變電源,直流采樣可以在一定范圍內滿足要求.
再,AVR做電源尤其要注意PCB設計的干擾問題,抗干擾沒有PIC強.并且破解非常
容易,費用低廉.
0
回復
