

上一篇講述了開關(guān)電源的COT控制模式,這一篇開始總結(jié)一下環(huán)路補(bǔ)償?shù)膬?nèi)容。一直以來, 環(huán)路的計(jì)算和補(bǔ)償都是開關(guān)電源領(lǐng)域的“難點(diǎn)”,難在哪里?個(gè)人感覺是因?yàn)橥耆斫馑枰欢ǖ男盘柵c系統(tǒng)和高等數(shù)學(xué)的基礎(chǔ),涉及到傅里葉變換,拉普拉斯變換以及時(shí)域頻域間的相互轉(zhuǎn)換。將這些大學(xué)期間學(xué)習(xí)的理論知識運(yùn)用到開關(guān)電源系統(tǒng)中,去分析其內(nèi)部反饋環(huán)路的穩(wěn)定性,并且在頻域求解出合適的補(bǔ)償器件參數(shù),還要結(jié)合波特圖衡量最終的閉環(huán)是否足夠穩(wěn)定同時(shí)具備一定余量。這一系列操作下來確實(shí)會讓很多初學(xué)者摸不著頭腦。但作為工程師,不能因?yàn)殡y就繞過它,而是要迎難而上~
開關(guān)電源系統(tǒng)中,引入負(fù)反饋電路,達(dá)到穩(wěn)定輸出電壓的目的。但,當(dāng)某一頻率的擾動信號經(jīng)過反饋環(huán)路后增益為0dB,相位翻轉(zhuǎn)180度,此時(shí),即使擾動源頭消失,該擾動信號也將一直存在于系統(tǒng),這就是反饋帶來的系統(tǒng)不穩(wěn)定。為了避免這種情況的發(fā)生,通過加入補(bǔ)償電路的方式,設(shè)計(jì)一個(gè)無條件穩(wěn)定的反饋系統(tǒng)是我們的目標(biāo)。首先,把整個(gè)系統(tǒng)分為被控對象和反饋兩部分,被控對象具有正向傳遞函數(shù)G(s),其輸出通過反饋網(wǎng)絡(luò)H(s)返回,來調(diào)整輸出,達(dá)到預(yù)期的電壓、電流量(如圖1)。電源系統(tǒng)中,被控對象由PWM調(diào)制器、功率級驅(qū)動器、開關(guān)管和LC濾波器構(gòu)成(如圖2),反饋模塊由分壓器、補(bǔ)償誤差放大器構(gòu)成(如圖3中包含),一般傾向于將誤差放大器分為兩個(gè)部分,一個(gè)只求和,另一個(gè)僅考慮增益。
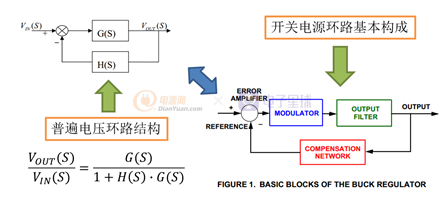
圖1.反饋環(huán)路的基本構(gòu)成

圖2. 功率級被控對象構(gòu)成圖
被控對象傳遞函數(shù)也成為控制到輸出的傳遞函數(shù),即變換器的輸出電壓除以控制電壓(誤差放大器輸出)。該傳遞函數(shù)就是PWM調(diào)制器(MODULATOR)和LC濾波器的傳遞函數(shù)之積。相當(dāng)于把LC濾波器的幅頻特性曲線向上垂直移動PWM調(diào)制器的增益。
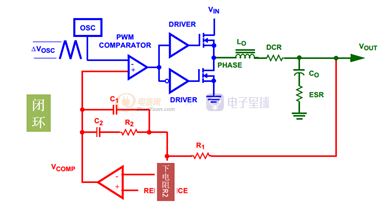
圖3. 閉環(huán)控制電路構(gòu)成圖
圖3所示為電壓控制模式下的閉環(huán)電路構(gòu)成圖,看到反饋部分包括分壓器、誤差放大器和補(bǔ)償網(wǎng)絡(luò)。分壓器就是分壓電阻,只帶來幅度的增益,誤差放大器又可以分為普通電壓型和跨導(dǎo)放大型,其補(bǔ)償網(wǎng)絡(luò)可給系統(tǒng)帶來增益和相位上的改善。需要注意,對于電壓型放大器,傳遞函數(shù)與下電阻無關(guān),下電阻只起到偏置作用。而對跨導(dǎo)放大器,兩個(gè)分壓電阻均參與環(huán)路補(bǔ)償。若使用跨導(dǎo)放大器,只有反饋電阻之比是最重要的,只要上下電阻比值不變,就能獲得相同的輸出電壓且環(huán)路幅相特性保持不變!但對于普通放大器,最好保持上電阻不變,修改下電阻阻值來改變輸出電壓,這樣能夠保證交流幅相特性不變。
上面介紹了開關(guān)電源反饋環(huán)路的基本組成,下面定量的列出它們的傳遞函數(shù):
- (1) PWM調(diào)制器、功率級驅(qū)動器、開關(guān)管

圖4. 功率級前端傳遞函數(shù)
這部分電路構(gòu)成了除LC濾波器之外的被控對象傳遞函數(shù),在電壓型控制模式下,由于采用固定頻率和幅度的PWM鋸齒波作為比較器同相輸入,因此可以精確的推算出它的傳遞函數(shù)(如圖4)。
- (2) LC濾波器傳遞函數(shù)
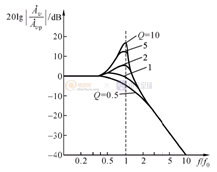
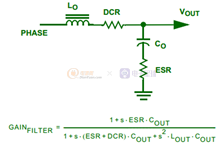
圖5. LC傳遞函數(shù)
降壓變換器后級有一個(gè)LC濾波器,但要注意在實(shí)際情況中還要考慮寄生參數(shù)的影響。如,L的DCR和C的ESR。電源系統(tǒng)的輸出電容越大越好是一個(gè)誤區(qū),這會在輸出濾波器響應(yīng)中產(chǎn)生很高的峰值(高Q值)。這種情況發(fā)生時(shí),相移會突變,導(dǎo)致條件穩(wěn)定性問題。(注意,R為負(fù)載電阻值)
- (3) 被控對象傳遞函數(shù)
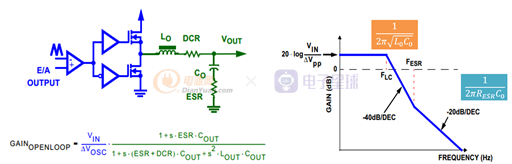
圖6. 被控對象傳遞函數(shù)
被控對象傳遞函數(shù)也成為控制到輸出的傳遞函數(shù),即變換器的輸出電壓除以控制電壓(誤差放大器輸出)。該傳遞函數(shù)就是PWM調(diào)制器(MODULATOR)和LC濾波器的傳遞函數(shù)之積。相當(dāng)于把LC濾波器的幅頻特性曲線向上垂直移動PWM調(diào)制器的增益。
以上就是電壓型控制模式下功率級(也叫被控對象)的傳遞函數(shù),可以看到它的頻率增益曲線中,有一個(gè)LC形成的雙極點(diǎn),一個(gè)ESR形成的零點(diǎn)。其實(shí)如果沒有補(bǔ)償電路也是可以的,因?yàn)镋SR零點(diǎn)頻率如果足夠低,就可以保證在穿越頻率處相位裕量大于45度,但這個(gè)因素不可控,所以還是需要設(shè)計(jì)補(bǔ)償電路保證穿越頻率處足夠的相位裕度。下面是針對電壓型控制模式的幾種補(bǔ)償方法:

圖7.Type2普通運(yùn)放補(bǔ)償傳遞函數(shù)
圖6所示是TYPE2型補(bǔ)償網(wǎng)絡(luò),適用于濾波電容含有ESR且選擇的穿越頻率大于ESR零點(diǎn)頻率的情況,便于利用ESR零點(diǎn)形成-1穿越斜率。否則,如果要求高帶寬下還有足夠的phase margin,或輸出電容ESR為0或ESR零點(diǎn)頻率超過零極點(diǎn)截止頻率,則需要TYPE3型補(bǔ)償網(wǎng)絡(luò)提供補(bǔ)償。另外在很多電流控制模式中也會選擇type2補(bǔ)償方式。
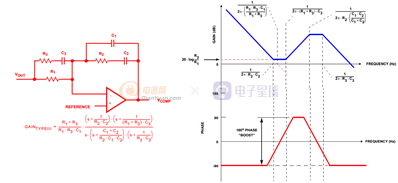
圖8. Type3普通運(yùn)放傳遞函數(shù)
對于TYPE3補(bǔ)償網(wǎng)絡(luò),提供一個(gè)零極點(diǎn)、兩個(gè)零點(diǎn)和兩個(gè)極點(diǎn)(如圖7)。設(shè)計(jì)時(shí),將兩個(gè)零點(diǎn)放在LC雙極點(diǎn)附近,第一個(gè)極點(diǎn)放在ESR形成的零點(diǎn)附近,第二個(gè)極點(diǎn)放在0.5Fsw、Fsw、Fc或10Fc處。注意:相位的改變是在零極點(diǎn)前緩慢的開始,到零極點(diǎn)后緩慢的結(jié)束。由于含有雙極點(diǎn)和雙零點(diǎn)的type3型補(bǔ)償具有更小的相位滯后,因此適合于不含ESR的LC濾波器補(bǔ)償,以減小相位滯后。需要注意,補(bǔ)償網(wǎng)絡(luò)增益一定不能高于誤差放大器的開環(huán)增益,否則會產(chǎn)生飽和。
上面就介紹了傳統(tǒng)電壓型控制模式下反饋環(huán)路補(bǔ)償網(wǎng)絡(luò)的構(gòu)成和傳遞函數(shù)的計(jì)算,但怎么通過這些參數(shù)判斷最終的環(huán)路是否穩(wěn)定呢?下面列出幾條一般準(zhǔn)則作為環(huán)路穩(wěn)定性判斷依據(jù):
- (1) 在穿越頻率F_co處,總開環(huán)相移要小于360°,且需要預(yù)留45°余量,即相位裕度大于45°(最好為60°)
- (2) 在穿越頻率F_co處,增益曲線變化率為-1,以避免穿-2斜率在穿越頻率處相位的快速變化
- (3) 提供必要的增益裕量(12dB)
備注:應(yīng)當(dāng)注意,并不是絕對要求開環(huán)增益曲線在穿越頻率附近的增益斜率為必須為-1,但是由于-1增益斜率對應(yīng)的相位曲線相位延遲較小,且變化相對緩慢,因此它能夠保證,當(dāng)某些環(huán)節(jié)的相位變化被忽略時(shí),相位曲線仍將具有足夠的相位裕量,使系統(tǒng)保持穩(wěn)定。
以上就是這篇文章的內(nèi)容,主要針對傳統(tǒng)電壓控制模式下的環(huán)路補(bǔ)償方法及其電路組成做了詳細(xì)介紹,之后列出了該模式下功率級和反饋補(bǔ)償網(wǎng)絡(luò)的傳遞函數(shù),最后給出了環(huán)路穩(wěn)定性判定的一般依據(jù)。下一篇打算介紹電流控制模式下的環(huán)路補(bǔ)償方法和相應(yīng)電路,估計(jì)下一篇寫完就該跟大家拜年了,哈哈~