
誰能推薦一下測試電源LOOP的儀器,最好是HP的,具體型號?配件?大致價錢?
謝謝!
測試電源loop的儀器
全部回復(25)
正序查看
倒序查看
@olala
我們現在用的是POWERTEK的GP102
工程師設計了在電源、電動機驅動器或幾乎任何功率電子產品內的一個控制回路以后,必須證實回路穩定性已達到規定的技術指標.與在回路上加瞬時負載之后進行紋波、噪聲、電壓偏移或恢復時間測量不同,你無法用傳統的測試儀器,如電壓表或示波器,有效地測試回路穩定性.
工程師要使用多種獨立的儀器或昂貴的專用設備來進行漫長而又復雜的測試,因此他們常常認為電路仿真能真實地反映制成品的特性.然而,盡管一種表面穩定的設計是以軟件仿真為基礎的,但工程師們卻會發現,印制電路板寄生電抗、生產中的元器件公差以及正常使用時的負載條件變化都會使制成品達不到預期的性能、工作不穩定甚至出故障.
軟件仿真雖然是一種有用的工程工具,但它僅僅根據編程員輸入程序中的信息,對系統響應進行近似.因此,用軟件仿真代替實際測量是不可靠的.如今,現代儀器技術為工程師提供的測試儀器能對這一關鍵設計特性進行直接測量,而且經濟實惠.眼下已有一系列經濟實用的技術可用來簡化環路穩定性測試(見附文“控制理論是起步之源”).
從測試點開始
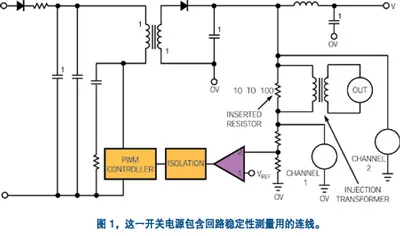
在閉路環境中進行實際測試的第一步是注入一個干擾信號.為達到這一目的,就要在環路中插入一個 10 Ω~ 100Ω 的電阻器,而所選的插入點要使這個小電阻產生的影響可以忽略不計,如與反饋電阻串聯(圖 1).如果你正在設計一塊新印制電路板,最好把這個電阻器永久性地加到電路板的布局里,這樣就可以在任何時侯進行這些測試,而不會打亂電路板布線.
為了確定控制環路的增益和相角裕度,要使用一個隔離變壓器把一系列離散頻率干擾信號加在這一插入的電阻器上,以保證控制回路不會被下拉至地電平(圖 2).在每一個被注入的頻率點上,要測量插入電阻器兩端的相對振幅(單位為dB)和相應相位(單位為度).這兩個測量值反映相應測試頻率上的閉環增益和回路延遲,并產生一個回路頻響圖,你依據頻響圖就可以確定回路穩定性.
為了有效地測量注入信號的相對增益和相位,測量儀器必須抑制除注入頻率以外的其它頻率成份.實現這種抑制的最好辦法,就是在你注入每一個選定的頻率時,對在檢測電阻器高端(即第1通道)和在檢測電阻器低端(即第2通道)測得的數據進行一次 DFT(離散傅立葉變換)(圖 3).只要在頻率掃描期間直接將經過 DFT 處理的 第 1 和 第2 通道的測量結果繪制成圖像,你就不必用 PC 進行處理就可以得到一個完整的頻響波德圖.例如,盡管圖 4 所示系統有好的增益裕度和相角裕度,但卻具有很低的增益和交叉頻率,從而在負載快速變化時調整率不佳,穩定性降低.與之相反,在滿負載時,雖然增益裕度比輕負載時小,但仍然足夠大,因而在很寬的頻率范圍內具有高得多的增益(圖 5).這一增益使系統即使在負載快速變化時仍具有出色的調整率和更高的穩定性.
為了確定某一電源有意義的特性,必須在電源預期要工作的負載條件范圍內測量其傳遞函數(圖 4 和圖 5).然后,一旦確定了在所選負載條件下的傳遞函數,你就要考慮設計修改對整個傳遞函數內極點元素和零點元素的影響,以實現最佳的總體性能.
一個極點元素會引入每十倍程-20 dB 的衰減和負相移,而零點元素則會引入每十倍程 20 dB的 衰減和正相移.完整的傳遞函數包括了控制回路內的極點元素和零點元素.幾乎所有系統都會在較高頻率下出現衰減,因此,傳遞函數中的極點元素通常多于零點元素.
在圖 4 所示的低端負載傳遞函數中,頻率高至增益交叉頻率的衰減是始終如一的,約為每十倍程 20 dB,這表示存在一個主極點.雖然為了說明主題,圖 1 沒有畫出電源的完整原理圖,但你要考慮到這一主極點是與控制回路中誤差放大器級的電容相關的.減少該級內的這一電容值,就會增加極點頻率,進而提高增益,從而改善低頻調整率.與這一修改相關的傳遞函數變化,會影響所有負載條件下的增益和相位,所以你必須在整個負載范圍內反復進行測試,以確保增益裕度和相位裕度都保持在目標限度內.
盡管在控制回路設計的早期,PC 仿真是一種有價值的工具,但設計師只有對已完成的設計進行實際測量,才能真正了解真實的控制回路特性.如今,現代測量儀器已能提供一種準確而又經濟的手段來應付這一挑戰.
--------------------------------------------------------------------------------
附文:控制理論是起步之源
控制回路理論闡述了隨時間變化的系統的行為.為了簡要復習基礎原理,現在考慮這一理論的最常見實例之一,即電源內的控制回路(圖 A).
一臺穩壓電源應為負載提供一個穩定的輸出電壓,為了實現這一目的,電源在不斷變化的負載條件下,必須能調節系統特性來保持所需的輸出電壓.你可以用一個控制回路來實現這種調節.這種控制回路將電源輸出的一部分反饋回去,與一個已知的基準信號進行比較.然后,利用比較產生的誤差信號來調整電源系統的增益,從而就能保持所需的輸出電壓.
只要考慮這個控制回路中的各個元件,你就可以推導出一個表述控制回路對輸入端產生影響的基本數學關系式,并利用這一關系式,根據任何輸入基準信號計算出輸出控制的變量.控制回路包括:一個基準信號 R,即系統的基本輸入信號;一個放大器級或增益級 A,即受控系統;一個受控變量 C,即系統的所需輸出信號;一個反饋級 B,即一個與系統輸出成比例的信號;BC, 即從反饋級送入相加節點的輸出信號;相加節點或比較器,在本例中為你從 R 中減去 BC 得到的信號 ;誤差信號E,即比較器的輸出信號.因此,E=R-BC,而且C=AE;C=A(R-BC)=AR-ABC; C(1+AB)=AR.因此,這一項為系統的傳遞函數,而且你只要用系統輸入乘以傳遞函數,就可求得任何控制系統的輸出.所以,盡管控制理論看來很簡單,但在隨時間不斷變化的條件下對回路穩定性進行分析則是十分復雜的.如果在任意頻率下,當回路增益大于 1(0 dB)時,回路相移在 360°以上,則所有閉環反饋系統都可能是不穩定的.當相移接近 360°和增益接近 0 dB時,系統即使沒有持續的振蕩,也會表現出不穩定的特性.為了維持閉環系統的受控特性,設計師一般都應用增益裕度和相位裕度標準.當回路相位延遲達到 360°時,回路增益應為 -20 dB或低于-20dB.而當回路增益大于 0 dB 時,整個回路的相位延遲應小于 315°,有 45°的裕度.
檢查一個控制回路的頻率響應或傳遞函數最方便的方法就是使用波德圖,你可以根據波德圖確定增益與相位裕度.圖 B 示出了由仿真軟件生成的一個典型波德圖,并示出了裕度與交叉頻率點.
工程師要使用多種獨立的儀器或昂貴的專用設備來進行漫長而又復雜的測試,因此他們常常認為電路仿真能真實地反映制成品的特性.然而,盡管一種表面穩定的設計是以軟件仿真為基礎的,但工程師們卻會發現,印制電路板寄生電抗、生產中的元器件公差以及正常使用時的負載條件變化都會使制成品達不到預期的性能、工作不穩定甚至出故障.
軟件仿真雖然是一種有用的工程工具,但它僅僅根據編程員輸入程序中的信息,對系統響應進行近似.因此,用軟件仿真代替實際測量是不可靠的.如今,現代儀器技術為工程師提供的測試儀器能對這一關鍵設計特性進行直接測量,而且經濟實惠.眼下已有一系列經濟實用的技術可用來簡化環路穩定性測試(見附文“控制理論是起步之源”).
從測試點開始
在閉路環境中進行實際測試的第一步是注入一個干擾信號.為達到這一目的,就要在環路中插入一個 10 Ω~ 100Ω 的電阻器,而所選的插入點要使這個小電阻產生的影響可以忽略不計,如與反饋電阻串聯(圖 1).如果你正在設計一塊新印制電路板,最好把這個電阻器永久性地加到電路板的布局里,這樣就可以在任何時侯進行這些測試,而不會打亂電路板布線.
為了確定控制環路的增益和相角裕度,要使用一個隔離變壓器把一系列離散頻率干擾信號加在這一插入的電阻器上,以保證控制回路不會被下拉至地電平(圖 2).在每一個被注入的頻率點上,要測量插入電阻器兩端的相對振幅(單位為dB)和相應相位(單位為度).這兩個測量值反映相應測試頻率上的閉環增益和回路延遲,并產生一個回路頻響圖,你依據頻響圖就可以確定回路穩定性.
為了有效地測量注入信號的相對增益和相位,測量儀器必須抑制除注入頻率以外的其它頻率成份.實現這種抑制的最好辦法,就是在你注入每一個選定的頻率時,對在檢測電阻器高端(即第1通道)和在檢測電阻器低端(即第2通道)測得的數據進行一次 DFT(離散傅立葉變換)(圖 3).只要在頻率掃描期間直接將經過 DFT 處理的 第 1 和 第2 通道的測量結果繪制成圖像,你就不必用 PC 進行處理就可以得到一個完整的頻響波德圖.例如,盡管圖 4 所示系統有好的增益裕度和相角裕度,但卻具有很低的增益和交叉頻率,從而在負載快速變化時調整率不佳,穩定性降低.與之相反,在滿負載時,雖然增益裕度比輕負載時小,但仍然足夠大,因而在很寬的頻率范圍內具有高得多的增益(圖 5).這一增益使系統即使在負載快速變化時仍具有出色的調整率和更高的穩定性.
為了確定某一電源有意義的特性,必須在電源預期要工作的負載條件范圍內測量其傳遞函數(圖 4 和圖 5).然后,一旦確定了在所選負載條件下的傳遞函數,你就要考慮設計修改對整個傳遞函數內極點元素和零點元素的影響,以實現最佳的總體性能.
一個極點元素會引入每十倍程-20 dB 的衰減和負相移,而零點元素則會引入每十倍程 20 dB的 衰減和正相移.完整的傳遞函數包括了控制回路內的極點元素和零點元素.幾乎所有系統都會在較高頻率下出現衰減,因此,傳遞函數中的極點元素通常多于零點元素.
在圖 4 所示的低端負載傳遞函數中,頻率高至增益交叉頻率的衰減是始終如一的,約為每十倍程 20 dB,這表示存在一個主極點.雖然為了說明主題,圖 1 沒有畫出電源的完整原理圖,但你要考慮到這一主極點是與控制回路中誤差放大器級的電容相關的.減少該級內的這一電容值,就會增加極點頻率,進而提高增益,從而改善低頻調整率.與這一修改相關的傳遞函數變化,會影響所有負載條件下的增益和相位,所以你必須在整個負載范圍內反復進行測試,以確保增益裕度和相位裕度都保持在目標限度內.
盡管在控制回路設計的早期,PC 仿真是一種有價值的工具,但設計師只有對已完成的設計進行實際測量,才能真正了解真實的控制回路特性.如今,現代測量儀器已能提供一種準確而又經濟的手段來應付這一挑戰.
--------------------------------------------------------------------------------
附文:控制理論是起步之源
控制回路理論闡述了隨時間變化的系統的行為.為了簡要復習基礎原理,現在考慮這一理論的最常見實例之一,即電源內的控制回路(圖 A).
一臺穩壓電源應為負載提供一個穩定的輸出電壓,為了實現這一目的,電源在不斷變化的負載條件下,必須能調節系統特性來保持所需的輸出電壓.你可以用一個控制回路來實現這種調節.這種控制回路將電源輸出的一部分反饋回去,與一個已知的基準信號進行比較.然后,利用比較產生的誤差信號來調整電源系統的增益,從而就能保持所需的輸出電壓.
只要考慮這個控制回路中的各個元件,你就可以推導出一個表述控制回路對輸入端產生影響的基本數學關系式,并利用這一關系式,根據任何輸入基準信號計算出輸出控制的變量.控制回路包括:一個基準信號 R,即系統的基本輸入信號;一個放大器級或增益級 A,即受控系統;一個受控變量 C,即系統的所需輸出信號;一個反饋級 B,即一個與系統輸出成比例的信號;BC, 即從反饋級送入相加節點的輸出信號;相加節點或比較器,在本例中為你從 R 中減去 BC 得到的信號 ;誤差信號E,即比較器的輸出信號.因此,E=R-BC,而且C=AE;C=A(R-BC)=AR-ABC; C(1+AB)=AR.因此,這一項為系統的傳遞函數,而且你只要用系統輸入乘以傳遞函數,就可求得任何控制系統的輸出.所以,盡管控制理論看來很簡單,但在隨時間不斷變化的條件下對回路穩定性進行分析則是十分復雜的.如果在任意頻率下,當回路增益大于 1(0 dB)時,回路相移在 360°以上,則所有閉環反饋系統都可能是不穩定的.當相移接近 360°和增益接近 0 dB時,系統即使沒有持續的振蕩,也會表現出不穩定的特性.為了維持閉環系統的受控特性,設計師一般都應用增益裕度和相位裕度標準.當回路相位延遲達到 360°時,回路增益應為 -20 dB或低于-20dB.而當回路增益大于 0 dB 時,整個回路的相位延遲應小于 315°,有 45°的裕度.
檢查一個控制回路的頻率響應或傳遞函數最方便的方法就是使用波德圖,你可以根據波德圖確定增益與相位裕度.圖 B 示出了由仿真軟件生成的一個典型波德圖,并示出了裕度與交叉頻率點.
0
回復
@天高云清
工程師設計了在電源、電動機驅動器或幾乎任何功率電子產品內的一個控制回路以后,必須證實回路穩定性已達到規定的技術指標.與在回路上加瞬時負載之后進行紋波、噪聲、電壓偏移或恢復時間測量不同,你無法用傳統的測試儀器,如電壓表或示波器,有效地測試回路穩定性. 工程師要使用多種獨立的儀器或昂貴的專用設備來進行漫長而又復雜的測試,因此他們常常認為電路仿真能真實地反映制成品的特性.然而,盡管一種表面穩定的設計是以軟件仿真為基礎的,但工程師們卻會發現,印制電路板寄生電抗、生產中的元器件公差以及正常使用時的負載條件變化都會使制成品達不到預期的性能、工作不穩定甚至出故障. 軟件仿真雖然是一種有用的工程工具,但它僅僅根據編程員輸入程序中的信息,對系統響應進行近似.因此,用軟件仿真代替實際測量是不可靠的.如今,現代儀器技術為工程師提供的測試儀器能對這一關鍵設計特性進行直接測量,而且經濟實惠.眼下已有一系列經濟實用的技術可用來簡化環路穩定性測試(見附文“控制理論是起步之源”). 從測試點開始 在閉路環境中進行實際測試的第一步是注入一個干擾信號.為達到這一目的,就要在環路中插入一個10Ω~100Ω的電阻器,而所選的插入點要使這個小電阻產生的影響可以忽略不計,如與反饋電阻串聯(圖1).如果你正在設計一塊新印制電路板,最好把這個電阻器永久性地加到電路板的布局里,這樣就可以在任何時侯進行這些測試,而不會打亂電路板布線. 為了確定控制環路的增益和相角裕度,要使用一個隔離變壓器把一系列離散頻率干擾信號加在這一插入的電阻器上,以保證控制回路不會被下拉至地電平(圖2).在每一個被注入的頻率點上,要測量插入電阻器兩端的相對振幅(單位為dB)和相應相位(單位為度).這兩個測量值反映相應測試頻率上的閉環增益和回路延遲,并產生一個回路頻響圖,你依據頻響圖就可以確定回路穩定性. 為了有效地測量注入信號的相對增益和相位,測量儀器必須抑制除注入頻率以外的其它頻率成份.實現這種抑制的最好辦法,就是在你注入每一個選定的頻率時,對在檢測電阻器高端(即第1通道)和在檢測電阻器低端(即第2通道)測得的數據進行一次DFT(離散傅立葉變換)(圖3).只要在頻率掃描期間直接將經過DFT處理的第1和第2通道的測量結果繪制成圖像,你就不必用PC進行處理就可以得到一個完整的頻響波德圖.例如,盡管圖4所示系統有好的增益裕度和相角裕度,但卻具有很低的增益和交叉頻率,從而在負載快速變化時調整率不佳,穩定性降低.與之相反,在滿負載時,雖然增益裕度比輕負載時小,但仍然足夠大,因而在很寬的頻率范圍內具有高得多的增益(圖5).這一增益使系統即使在負載快速變化時仍具有出色的調整率和更高的穩定性. 為了確定某一電源有意義的特性,必須在電源預期要工作的負載條件范圍內測量其傳遞函數(圖4和圖5).然后,一旦確定了在所選負載條件下的傳遞函數,你就要考慮設計修改對整個傳遞函數內極點元素和零點元素的影響,以實現最佳的總體性能. 一個極點元素會引入每十倍程-20dB的衰減和負相移,而零點元素則會引入每十倍程20dB的衰減和正相移.完整的傳遞函數包括了控制回路內的極點元素和零點元素.幾乎所有系統都會在較高頻率下出現衰減,因此,傳遞函數中的極點元素通常多于零點元素. 在圖4所示的低端負載傳遞函數中,頻率高至增益交叉頻率的衰減是始終如一的,約為每十倍程20dB,這表示存在一個主極點.雖然為了說明主題,圖1沒有畫出電源的完整原理圖,但你要考慮到這一主極點是與控制回路中誤差放大器級的電容相關的.減少該級內的這一電容值,就會增加極點頻率,進而提高增益,從而改善低頻調整率.與這一修改相關的傳遞函數變化,會影響所有負載條件下的增益和相位,所以你必須在整個負載范圍內反復進行測試,以確保增益裕度和相位裕度都保持在目標限度內. 盡管在控制回路設計的早期,PC仿真是一種有價值的工具,但設計師只有對已完成的設計進行實際測量,才能真正了解真實的控制回路特性.如今,現代測量儀器已能提供一種準確而又經濟的手段來應付這一挑戰.-------------------------------------------------------------------------------- 附文:控制理論是起步之源 控制回路理論闡述了隨時間變化的系統的行為.為了簡要復習基礎原理,現在考慮這一理論的最常見實例之一,即電源內的控制回路(圖A). 一臺穩壓電源應為負載提供一個穩定的輸出電壓,為了實現這一目的,電源在不斷變化的負載條件下,必須能調節系統特性來保持所需的輸出電壓.你可以用一個控制回路來實現這種調節.這種控制回路將電源輸出的一部分反饋回去,與一個已知的基準信號進行比較.然后,利用比較產生的誤差信號來調整電源系統的增益,從而就能保持所需的輸出電壓. 只要考慮這個控制回路中的各個元件,你就可以推導出一個表述控制回路對輸入端產生影響的基本數學關系式,并利用這一關系式,根據任何輸入基準信號計算出輸出控制的變量.控制回路包括:一個基準信號R,即系統的基本輸入信號;一個放大器級或增益級A,即受控系統;一個受控變量C,即系統的所需輸出信號;一個反饋級B,即一個與系統輸出成比例的信號;BC,即從反饋級送入相加節點的輸出信號;相加節點或比較器,在本例中為你從R中減去BC得到的信號;誤差信號E,即比較器的輸出信號.因此,E=R-BC,而且C=AE;C=A(R-BC)=AR-ABC;C(1+AB)=AR.因此,這一項為系統的傳遞函數,而且你只要用系統輸入乘以傳遞函數,就可求得任何控制系統的輸出.所以,盡管控制理論看來很簡單,但在隨時間不斷變化的條件下對回路穩定性進行分析則是十分復雜的.如果在任意頻率下,當回路增益大于1(0dB)時,回路相移在360°以上,則所有閉環反饋系統都可能是不穩定的.當相移接近360°和增益接近0dB時,系統即使沒有持續的振蕩,也會表現出不穩定的特性.為了維持閉環系統的受控特性,設計師一般都應用增益裕度和相位裕度標準.當回路相位延遲達到360°時,回路增益應為-20dB或低于-20dB.而當回路增益大于0dB時,整個回路的相位延遲應小于315°,有45°的裕度. 檢查一個控制回路的頻率響應或傳遞函數最方便的方法就是使用波德圖,你可以根據波德圖確定增益與相位裕度.圖B示出了由仿真軟件生成的一個典型波德圖,并示出了裕度與交叉頻率點.
 500) {this.resized=true; this.width=500; this.alt='這是一張縮略圖,點擊可放大。\n按住CTRL,滾動鼠標滾輪可自由縮放';this.style.cursor='hand'}" onclick="if(!this.resized) {return true;} else {window.open('http://u.dianyuan.com/bbs/u/38/1140137725.jpg');}" onmousewheel="return imgzoom(this);">
500) {this.resized=true; this.width=500; this.alt='這是一張縮略圖,點擊可放大。\n按住CTRL,滾動鼠標滾輪可自由縮放';this.style.cursor='hand'}" onclick="if(!this.resized) {return true;} else {window.open('http://u.dianyuan.com/bbs/u/38/1140137725.jpg');}" onmousewheel="return imgzoom(this);"> 0
回復
@天高云清
[圖片]500){this.resized=true;this.width=500;this.alt='這是一張縮略圖,點擊可放大。\n按住CTRL,滾動鼠標滾輪可自由縮放';this.style.cursor='hand'}"onclick="if(!this.resized){returntrue;}else{window.open('http://u.dianyuan.com/bbs/u/38/1140137725.jpg');}"onmousewheel="returnimgzoom(this);">
 500) {this.resized=true; this.width=500; this.alt='這是一張縮略圖,點擊可放大。\n按住CTRL,滾動鼠標滾輪可自由縮放';this.style.cursor='hand'}" onclick="if(!this.resized) {return true;} else {window.open('http://u.dianyuan.com/bbs/u/38/1140137771.jpg');}" onmousewheel="return imgzoom(this);">
500) {this.resized=true; this.width=500; this.alt='這是一張縮略圖,點擊可放大。\n按住CTRL,滾動鼠標滾輪可自由縮放';this.style.cursor='hand'}" onclick="if(!this.resized) {return true;} else {window.open('http://u.dianyuan.com/bbs/u/38/1140137771.jpg');}" onmousewheel="return imgzoom(this);">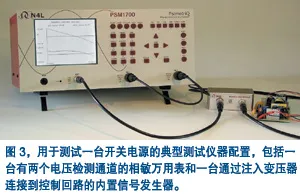 500) {this.resized=true; this.width=500; this.alt='這是一張縮略圖,點擊可放大。\n按住CTRL,滾動鼠標滾輪可自由縮放';this.style.cursor='hand'}" onclick="if(!this.resized) {return true;} else {window.open('http://u.dianyuan.com/bbs/u/38/1140137779.jpg');}" onmousewheel="return imgzoom(this);">
500) {this.resized=true; this.width=500; this.alt='這是一張縮略圖,點擊可放大。\n按住CTRL,滾動鼠標滾輪可自由縮放';this.style.cursor='hand'}" onclick="if(!this.resized) {return true;} else {window.open('http://u.dianyuan.com/bbs/u/38/1140137779.jpg');}" onmousewheel="return imgzoom(this);">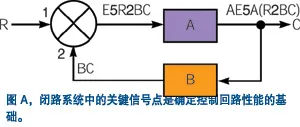 500) {this.resized=true; this.width=500; this.alt='這是一張縮略圖,點擊可放大。\n按住CTRL,滾動鼠標滾輪可自由縮放';this.style.cursor='hand'}" onclick="if(!this.resized) {return true;} else {window.open('http://u.dianyuan.com/bbs/u/38/1140137786.jpg');}" onmousewheel="return imgzoom(this);">
500) {this.resized=true; this.width=500; this.alt='這是一張縮略圖,點擊可放大。\n按住CTRL,滾動鼠標滾輪可自由縮放';this.style.cursor='hand'}" onclick="if(!this.resized) {return true;} else {window.open('http://u.dianyuan.com/bbs/u/38/1140137786.jpg');}" onmousewheel="return imgzoom(this);">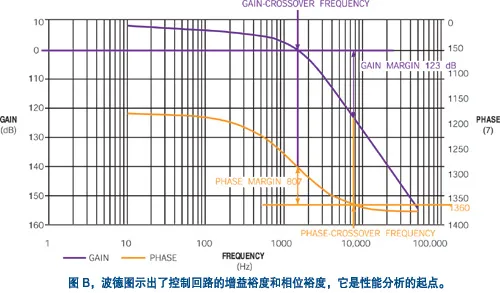 500) {this.resized=true; this.width=500; this.alt='這是一張縮略圖,點擊可放大。\n按住CTRL,滾動鼠標滾輪可自由縮放';this.style.cursor='hand'}" onclick="if(!this.resized) {return true;} else {window.open('http://u.dianyuan.com/bbs/u/38/1140137793.jpg');}" onmousewheel="return imgzoom(this);">
500) {this.resized=true; this.width=500; this.alt='這是一張縮略圖,點擊可放大。\n按住CTRL,滾動鼠標滾輪可自由縮放';this.style.cursor='hand'}" onclick="if(!this.resized) {return true;} else {window.open('http://u.dianyuan.com/bbs/u/38/1140137793.jpg');}" onmousewheel="return imgzoom(this);"> 0
回復
@天高云清
[圖片]500){this.resized=true;this.width=500;this.alt='這是一張縮略圖,點擊可放大。\n按住CTRL,滾動鼠標滾輪可自由縮放';this.style.cursor='hand'}"onclick="if(!this.resized){returntrue;}else{window.open('http://u.dianyuan.com/bbs/u/38/1140137771.jpg');}"onmousewheel="returnimgzoom(this);">[圖片]500){this.resized=true;this.width=500;this.alt='這是一張縮略圖,點擊可放大。\n按住CTRL,滾動鼠標滾輪可自由縮放';this.style.cursor='hand'}"onclick="if(!this.resized){returntrue;}else{window.open('http://u.dianyuan.com/bbs/u/38/1140137779.jpg');}"onmousewheel="returnimgzoom(this);">[圖片]500){this.resized=true;this.width=500;this.alt='這是一張縮略圖,點擊可放大。\n按住CTRL,滾動鼠標滾輪可自由縮放';this.style.cursor='hand'}"onclick="if(!this.resized){returntrue;}else{window.open('http://u.dianyuan.com/bbs/u/38/1140137786.jpg');}"onmousewheel="returnimgzoom(this);">[圖片]500){this.resized=true;this.width=500;this.alt='這是一張縮略圖,點擊可放大。\n按住CTRL,滾動鼠標滾輪可自由縮放';this.style.cursor='hand'}"onclick="if(!this.resized){returntrue;}else{window.open('http://u.dianyuan.com/bbs/u/38/1140137793.jpg');}"onmousewheel="returnimgzoom(this);">
圖片與文章未能在一起,帶來不便請諒解!
0
回復
