
NB-IoT是構建物聯網的一個重要分支,廣泛應用于智慧電表,智能家居,門磁系統等場合。以上應用場合很多情況下設備處于待機狀態,要求系統具有極低的待機功耗達到10年電池壽命,這對供電電源管理芯片待機功耗要求極高。
ROHM的Nano Enegy技術具有超高效率和超低代理功耗特點,待機靜態電流可以達到180nA, 非常適用于該NB-IoT模組供電需求,另外BD70522GUL尺寸僅為1.76x1.56mm可以降低PCB總面積。
有幸拿到ROHM的電池管理評估板REFLVBMS001-EVK-001,下面是對該評估板的介紹和測試,主要是針對低Iq BUCK芯片BD70522GUL進行測試評估。
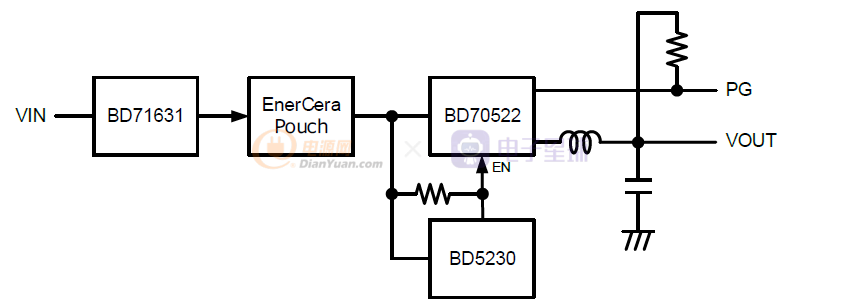
1. 系統構成
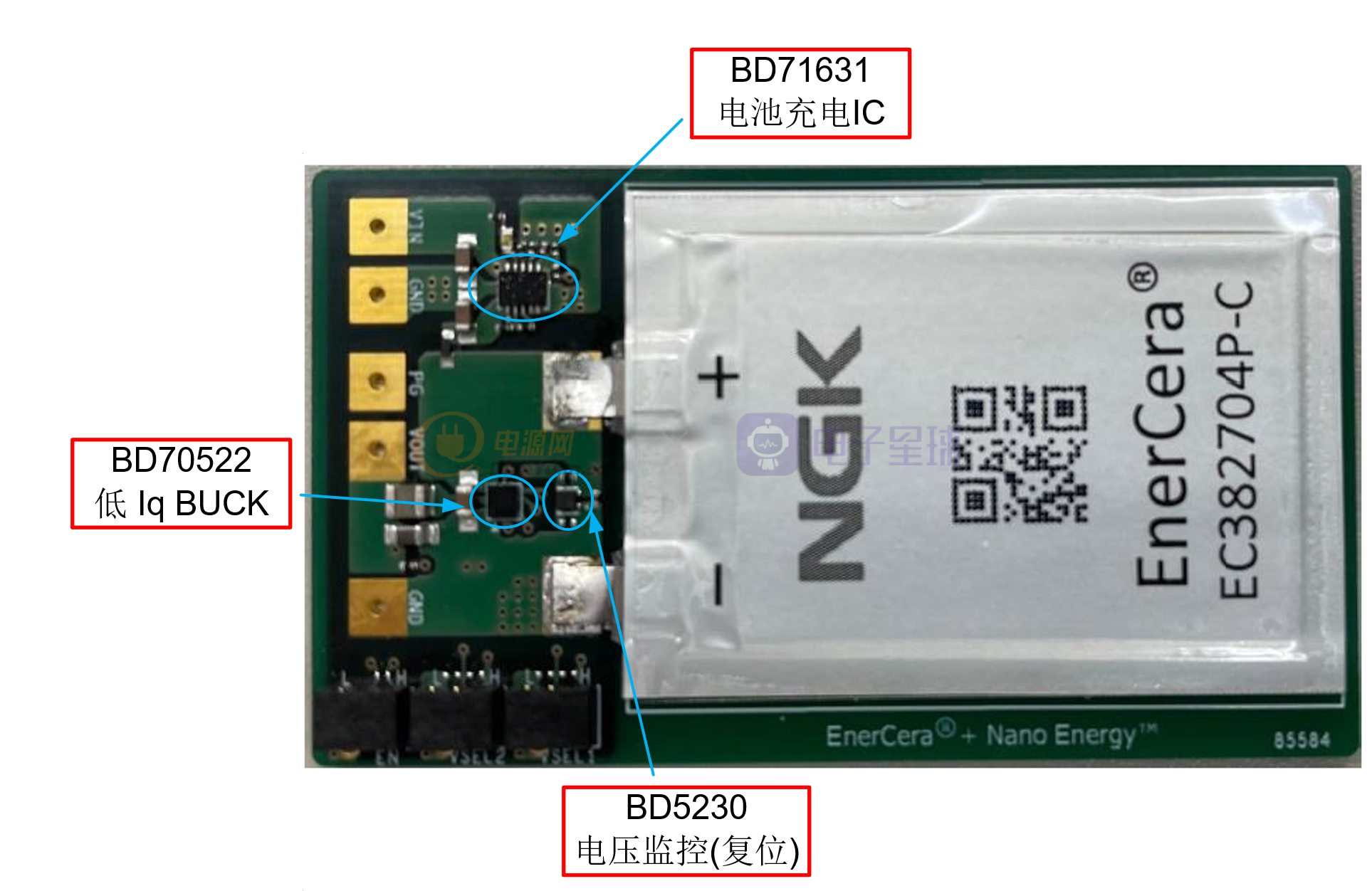
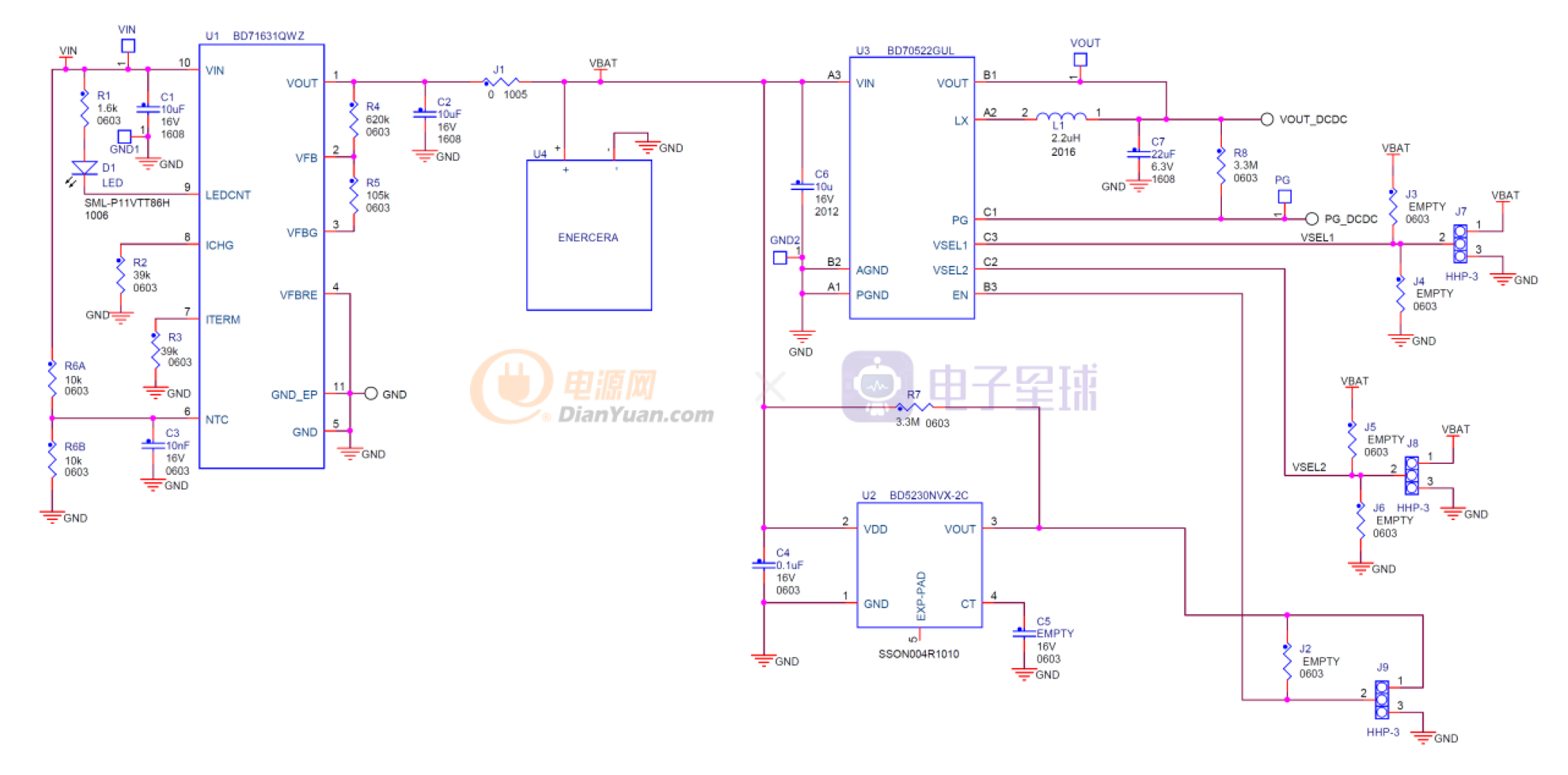
可以看到該系統板由一個充電管理芯片BD71631QWZ+低Iq BUCK芯片BD70522GUL+ 電壓檢測(復位)芯片BD5230NVX+一片極薄(0.45mm厚)鋰電池構成。
■ 充電管理芯片BD71631QWZ
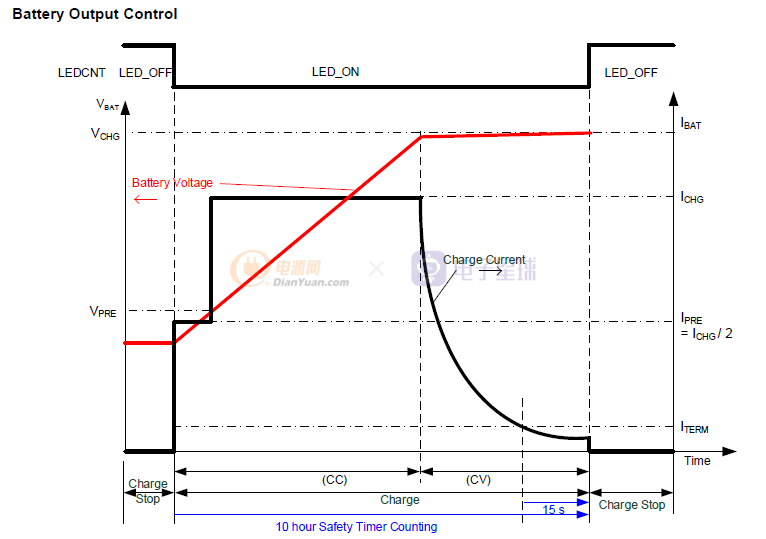
其中BD71631QWZ用于對鋰電池進行充電控制,從手冊中看到芯片控制充電過程分為三個階段:
• 首先會以0.5倍設定充電電流對電池進行恒流預充電直到電壓達到設定的預充電閾值VPRE;
• 當電池電壓達到預充電閾值時芯片以1倍設定電流恒流充電;
• 當電池電壓達到電池設定電壓值時,芯片進入恒壓充電模式減小充電電流對電池進行保護。
■ 低Iq BUCK芯片BD70522GUL
? 這顆芯片主打低Iq,從手冊上看工作靜態電流Typ值僅為180nA,關機電流為50nA,這個電流級別測試對設備精度也提出了很高的要求,后面打算使用6位半精度設備對其進行測試;
• 另外看到該IC采用COT(constant on time)控制方式以提高動態響應速度;后面會測試動態跳變來看下這顆IC的響應速度表現;
■ 電壓檢測(復位)芯片BD5230NVX
• 這顆芯片主要用來檢測電池電壓,防止鋰電池過放損傷;
• 值得一提的是這顆芯片非常小,只有W(Typ) x D(Typ) x H(Max)=1.00 mm x 1.00 mm x 0.60 mm,對手工焊接提出了很高要求,后面測試buck IC的靜態電流時會把這顆芯片拿掉。
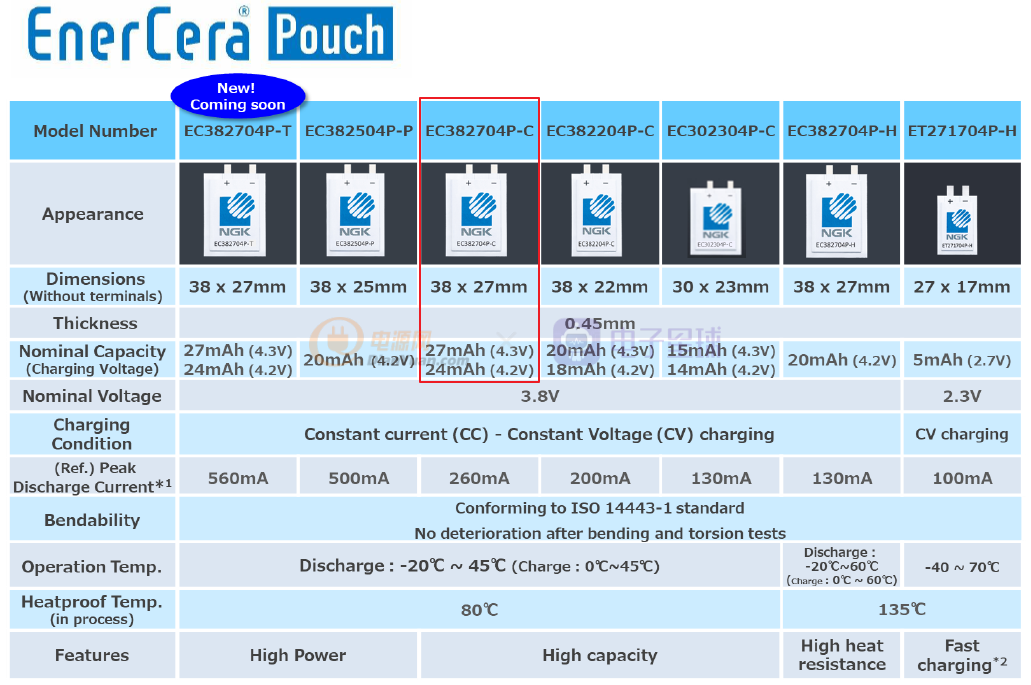
■ EnerCera 鋰電池EC382704P-C
這個鋰電池4.3V滿電容量有27mAh,另外電池超薄只有0.45mm厚,可以進行彎曲,官網給出了一幅圖片,可以用于貼在酒瓶表面進行電子標簽供電。

2. 測試篇
■ Battery供電開機
首先測試一下電池供電系統上電時序,這里用電源供電代替鋰電池(記得先把鋰電池拆下來哦)
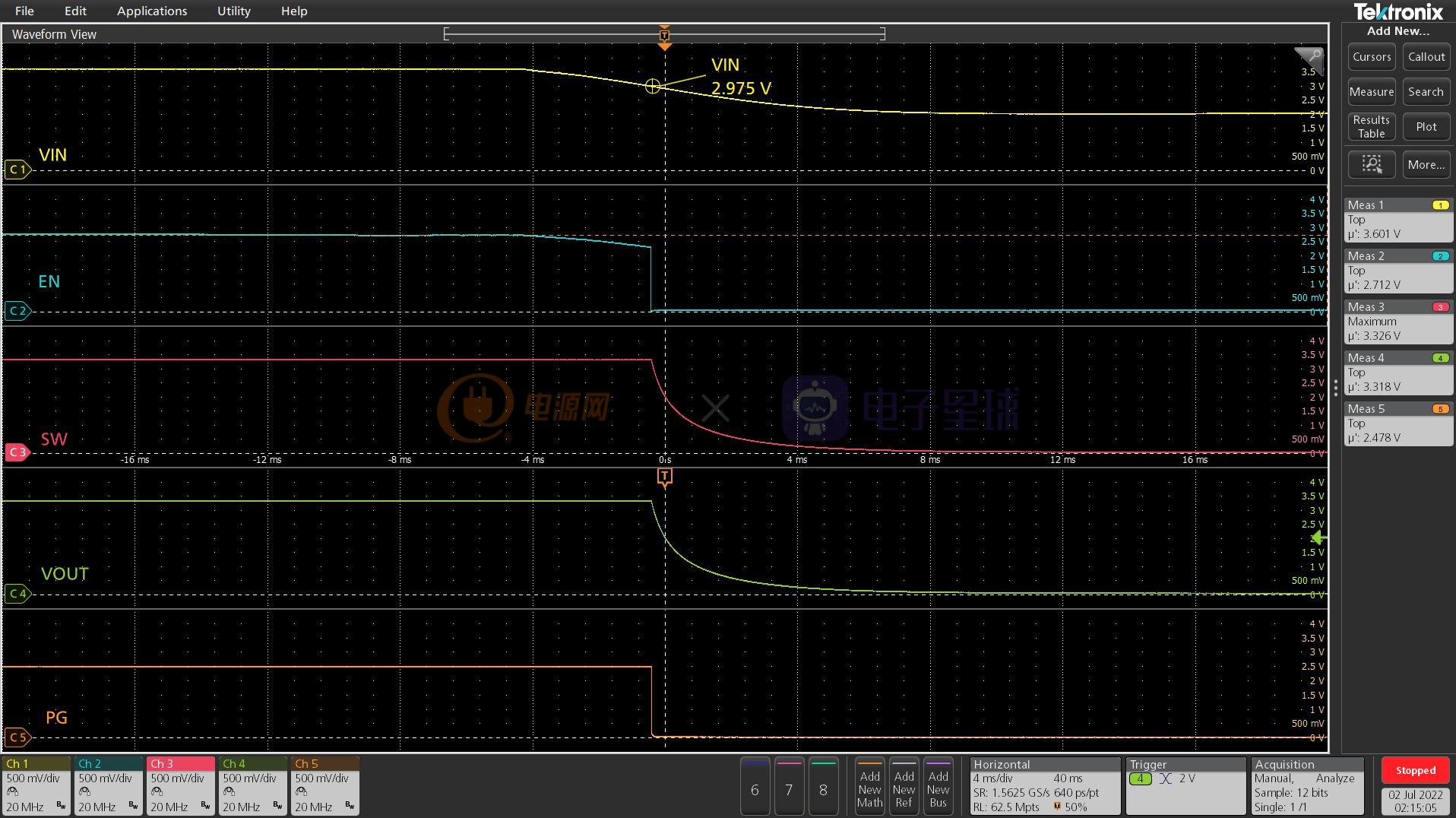
CH1: VIN, 電源輸入電壓模擬鋰電池供電;
CH2: EN, BUCK的使能端也是Reset IC的輸出端;
CH3: SW, BUCK開關節點SW波形;
CH4: Vout波形;
CH5: PG信號;

整個上電過程為:CH1電池電壓VIN上電達到3.1V時->CH2 Reset芯片輸出高即buck EN置高->delay 大約5ms后buck IC軟啟動開機,軟啟動時間大約為2.4ms->軟啟動結束,Vout輸出正常PG信號輸出高電平.
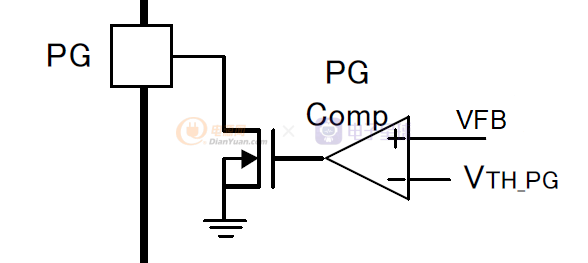
PG:Power Good信號,用來指示BUCK IC是否輸出正常,內部是Open Drain結構,需要上拉。
■ Battery供電關機
同樣用電源模擬鋰電池供電關機,可以看到當VIN下降到2.975V時Reset芯片輸出低將BUCK EN拉低,BUCK開始關機,Vout下降。(該波形為空載測試,buck處于burst模式,所以SW會有很長一段時間為高)
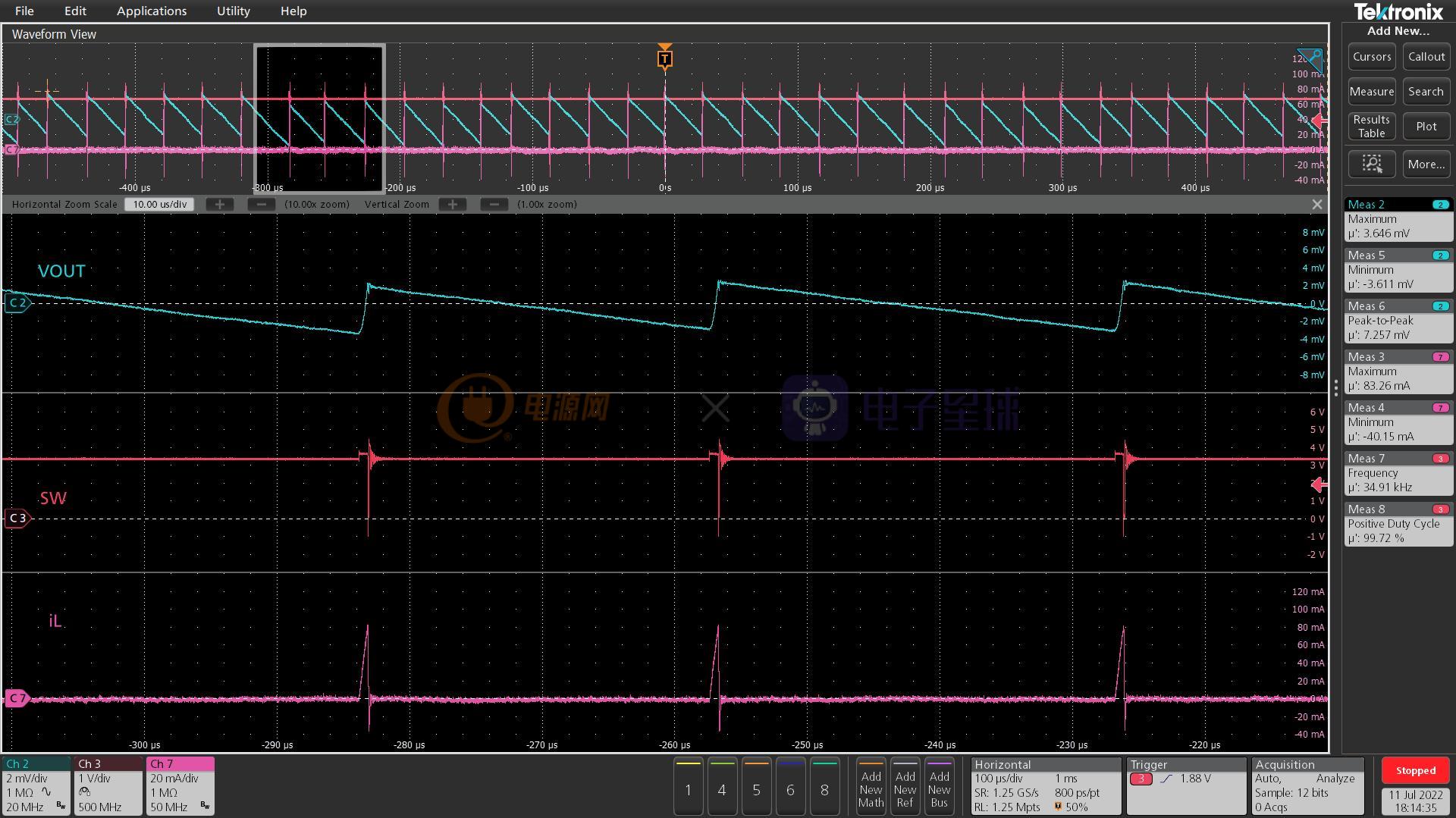
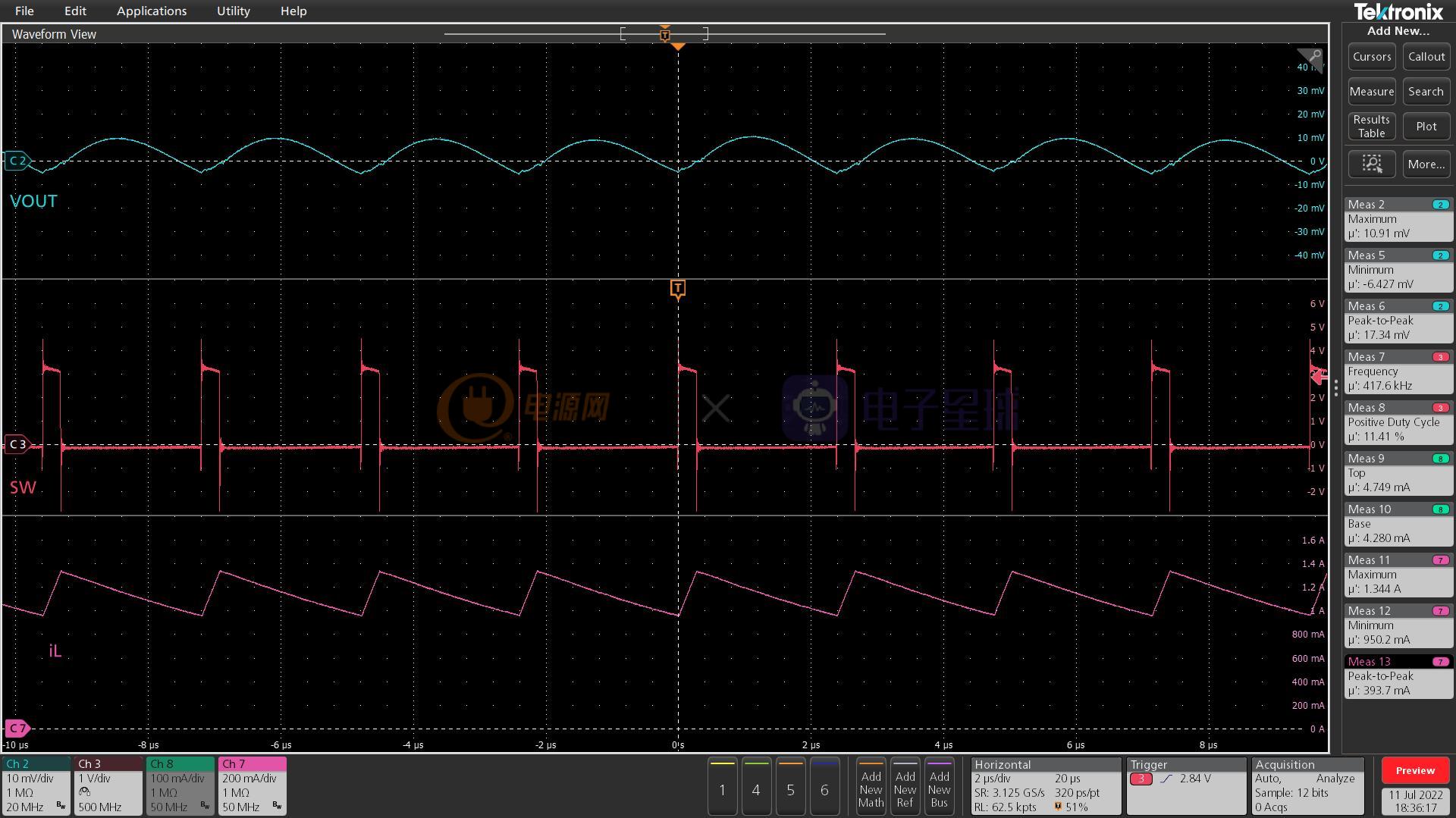
■ BUCK芯片穩態紋波
CH2: VOUT(ac 耦合);
CH3: SW;
CH7: iL,電感電流;
以下是3.6Vin-3.3Vout工況下的紋波測試。
? 空載紋波-7mV Vpp
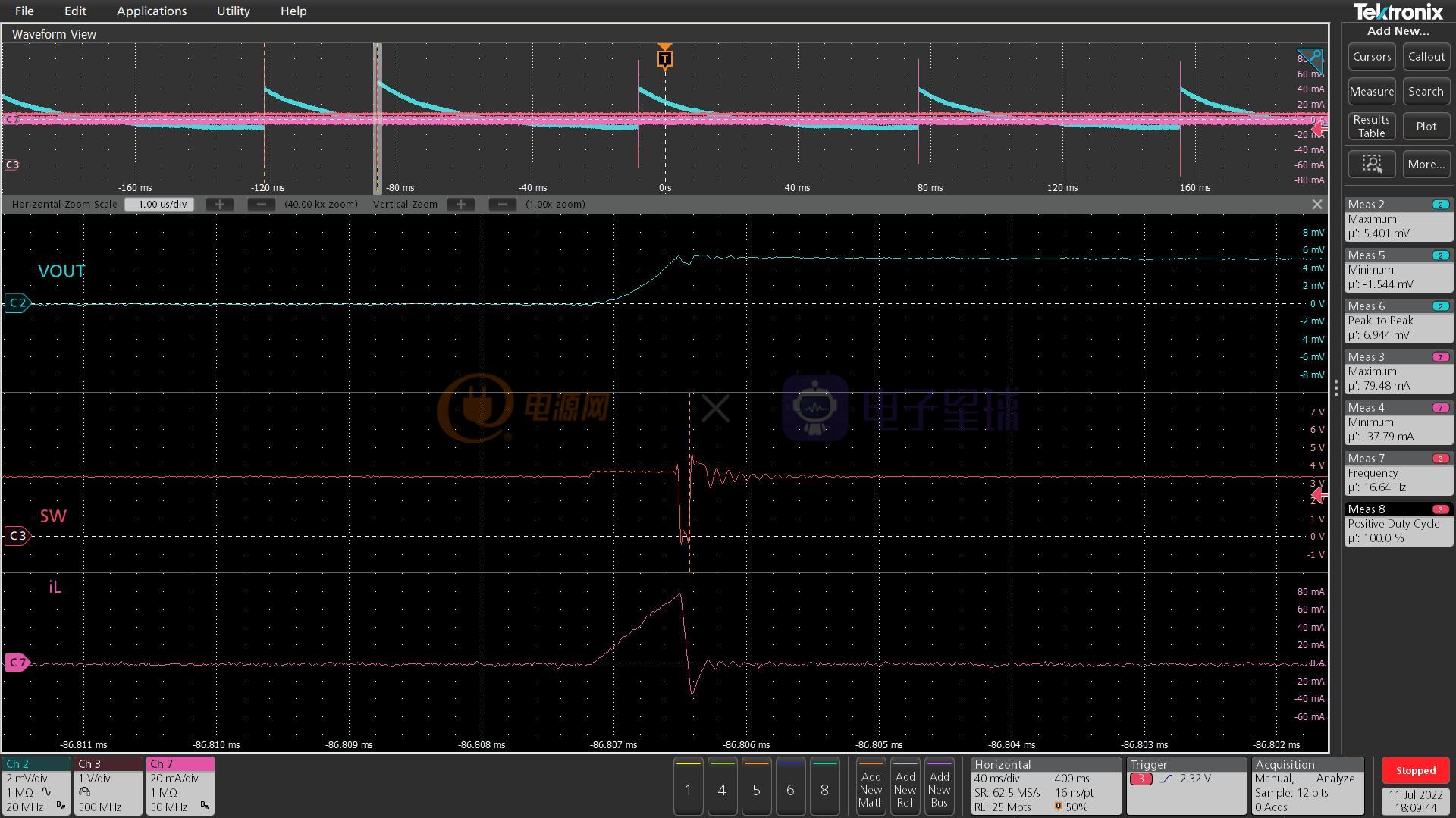
可以看出該芯片支持Burst模式,控制邏輯也很簡單,當Vout達到設定high值時SW關閉,等待Vout降低到設定low值時SW動作上管開通向輸出傳遞能量Vout升高,可以看出每隔大約80ms開關管才動作一次,這也是該芯片能做到極低功耗的一個原因。
不過因為是burst模式,也就意味著開關頻率會隨著負載的變化而發生改變,后面緩慢增加負載也會開到開關頻率的變化。
? 10uA負載紋波-15mV Vpp
10uA負載時輸出Vout ripple大小不均勻,這也導致了Ripple增大,這是因為脈沖個數有1-2個不固定導致,推測主要是內部檢測Vout時有noise干擾導致比較器動作次數不固定。

? 1mA負載紋波-7mV Vpp
1mA負載脈沖已經可以均勻打出,ripple形狀比較固定
? 100mA負載紋波-7mV Vpp
100mA負載電感電流已經進入CCM
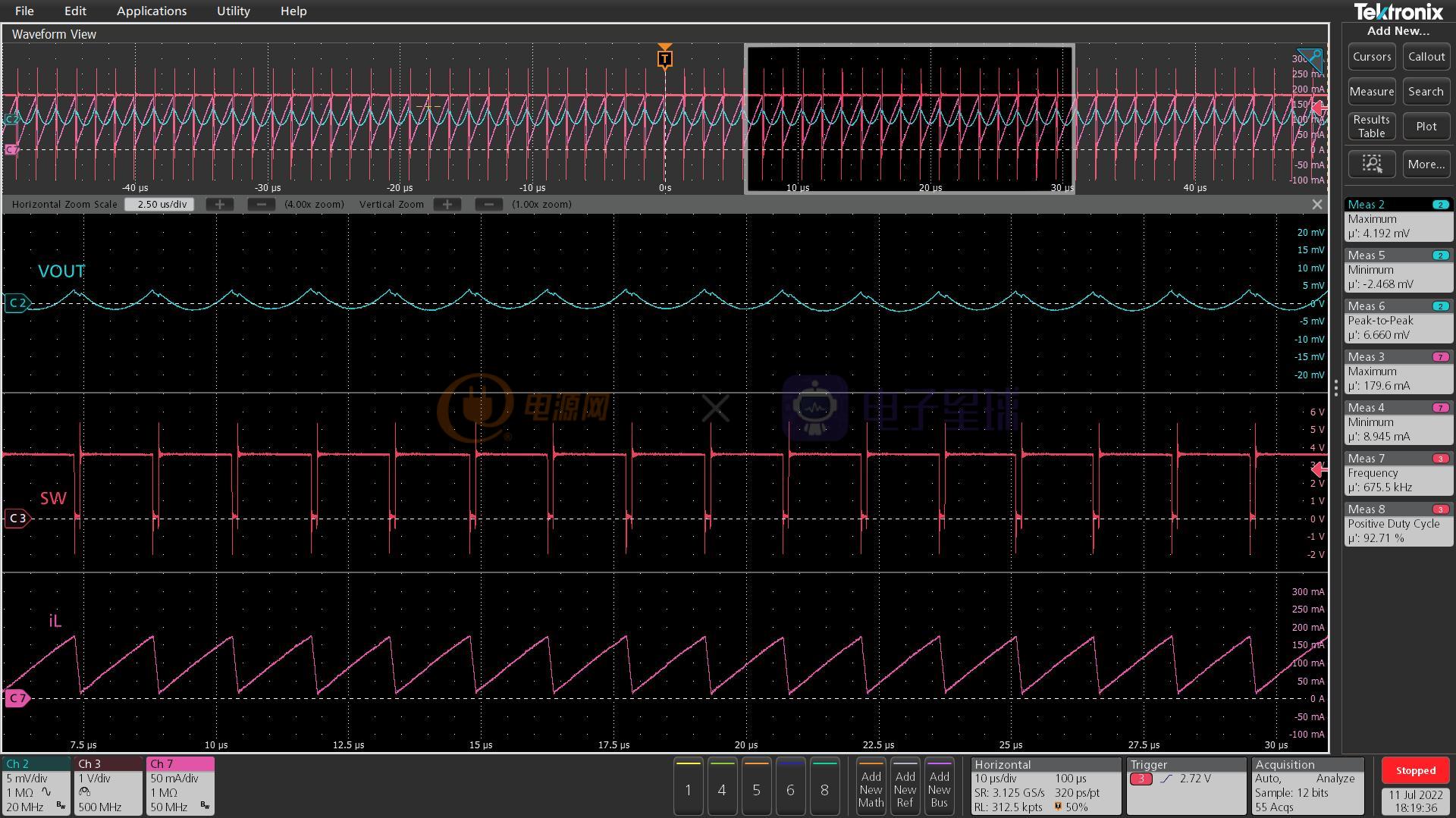
? 500mA滿載紋波-20mV Vpp
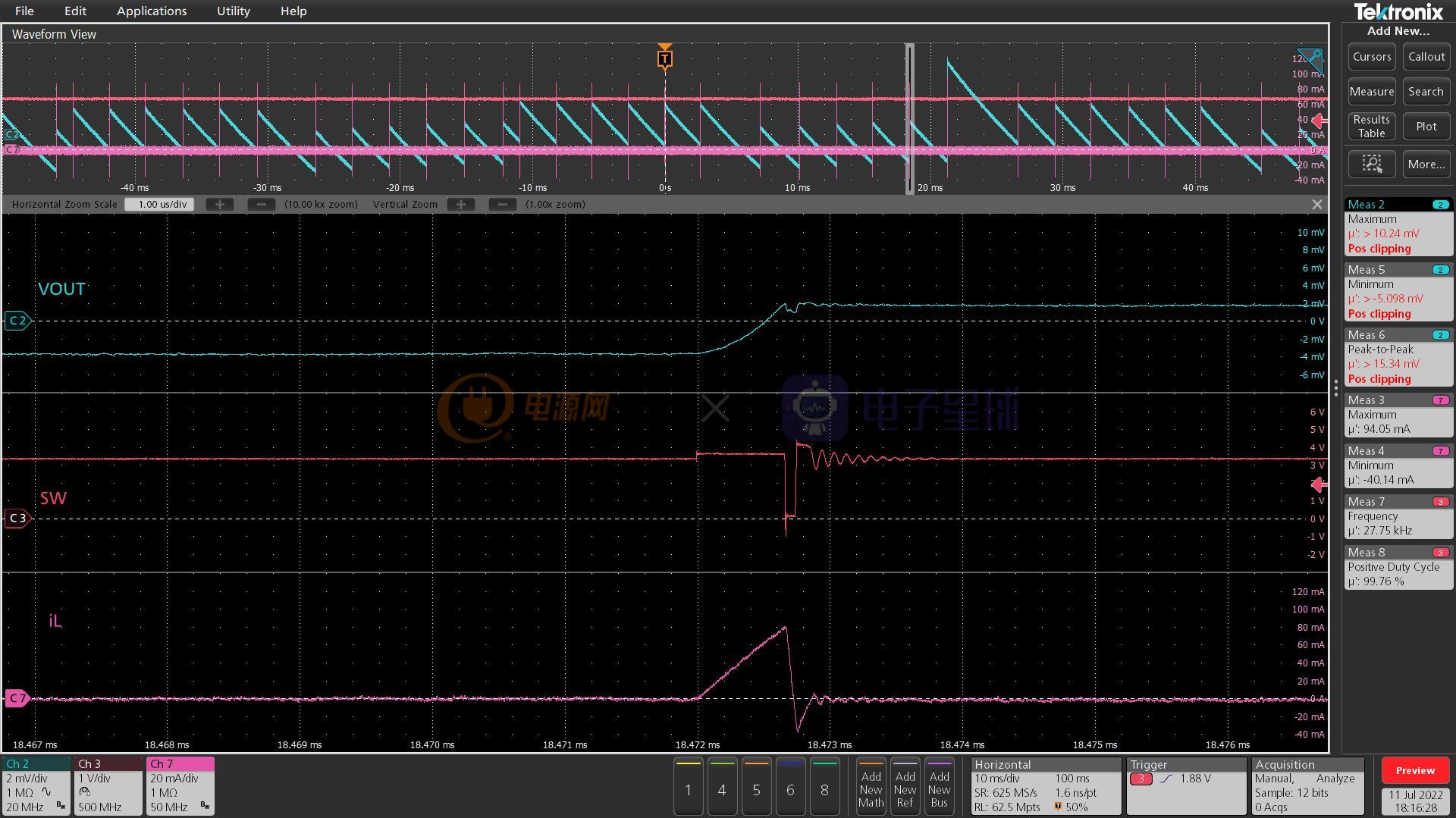
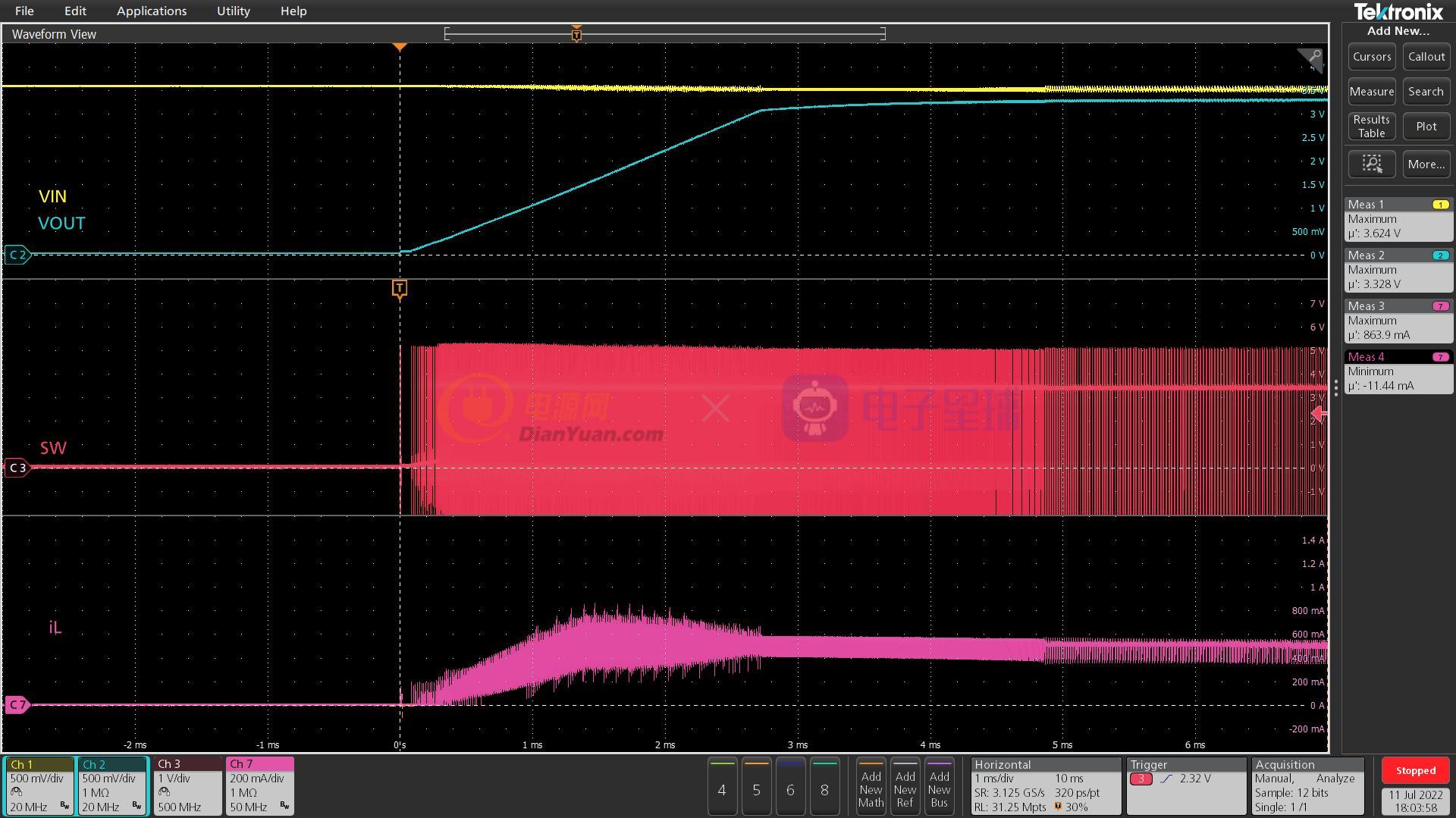
■ BUCK芯片空滿載起機測試
CH1: VIN;
CH2: VOUT;
CH3: SW;
CH7: iL,電感電流;
? 空載起機波形, 電感電流最大值達到340mA

? 滿載500mA起機波形, 電感電流最大值達到863mA,因此選擇電感時要考慮余量防止電感飽和;
■ BUCK芯片動態負載測試
buck采用的COT控制,該控制方法最大的優勢就是響應迅速,很多VR buck場合都會采用這種控制方法,下面我們來看看動態響應如何吧
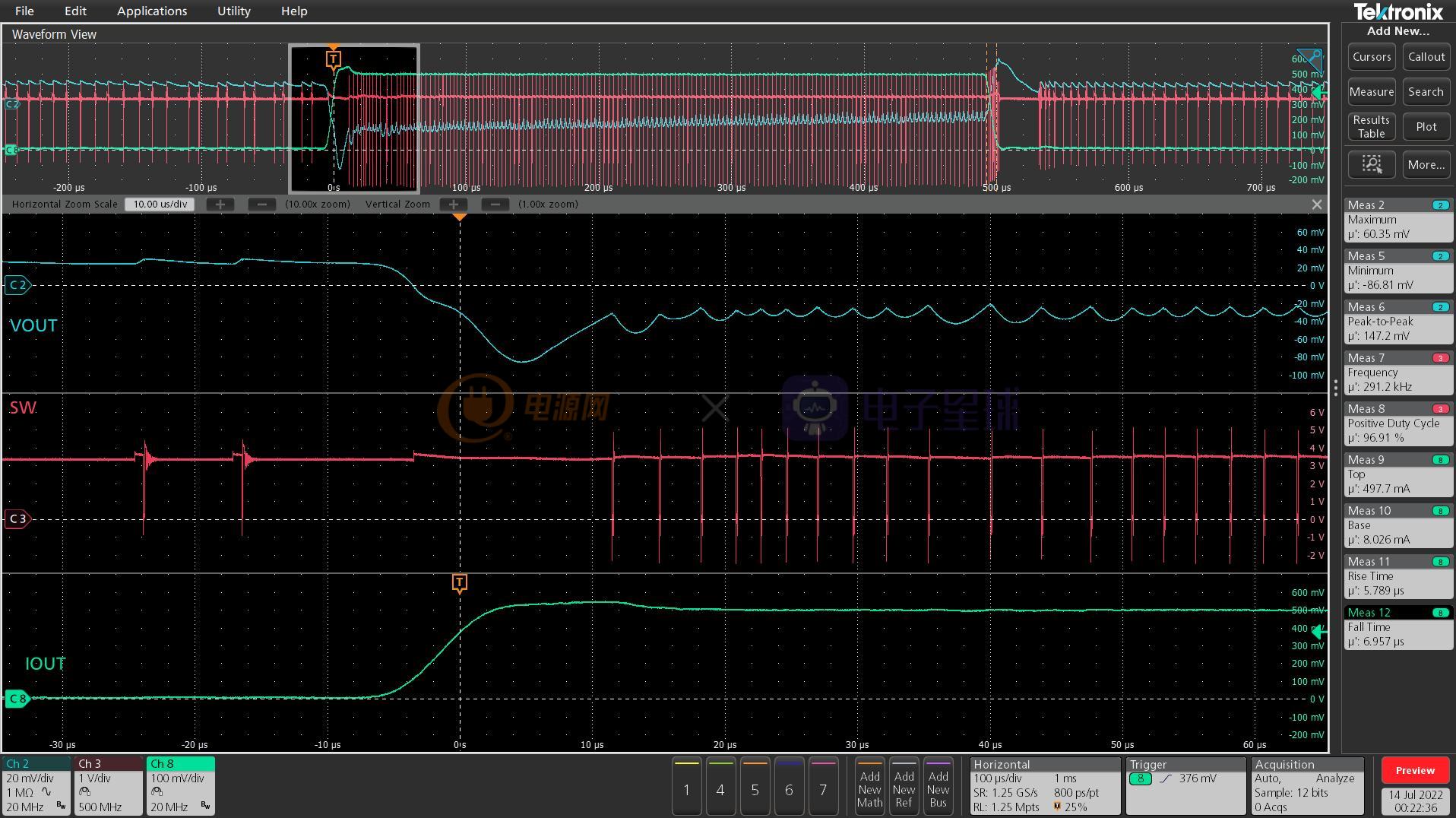
? 0-500mA 跳變測試
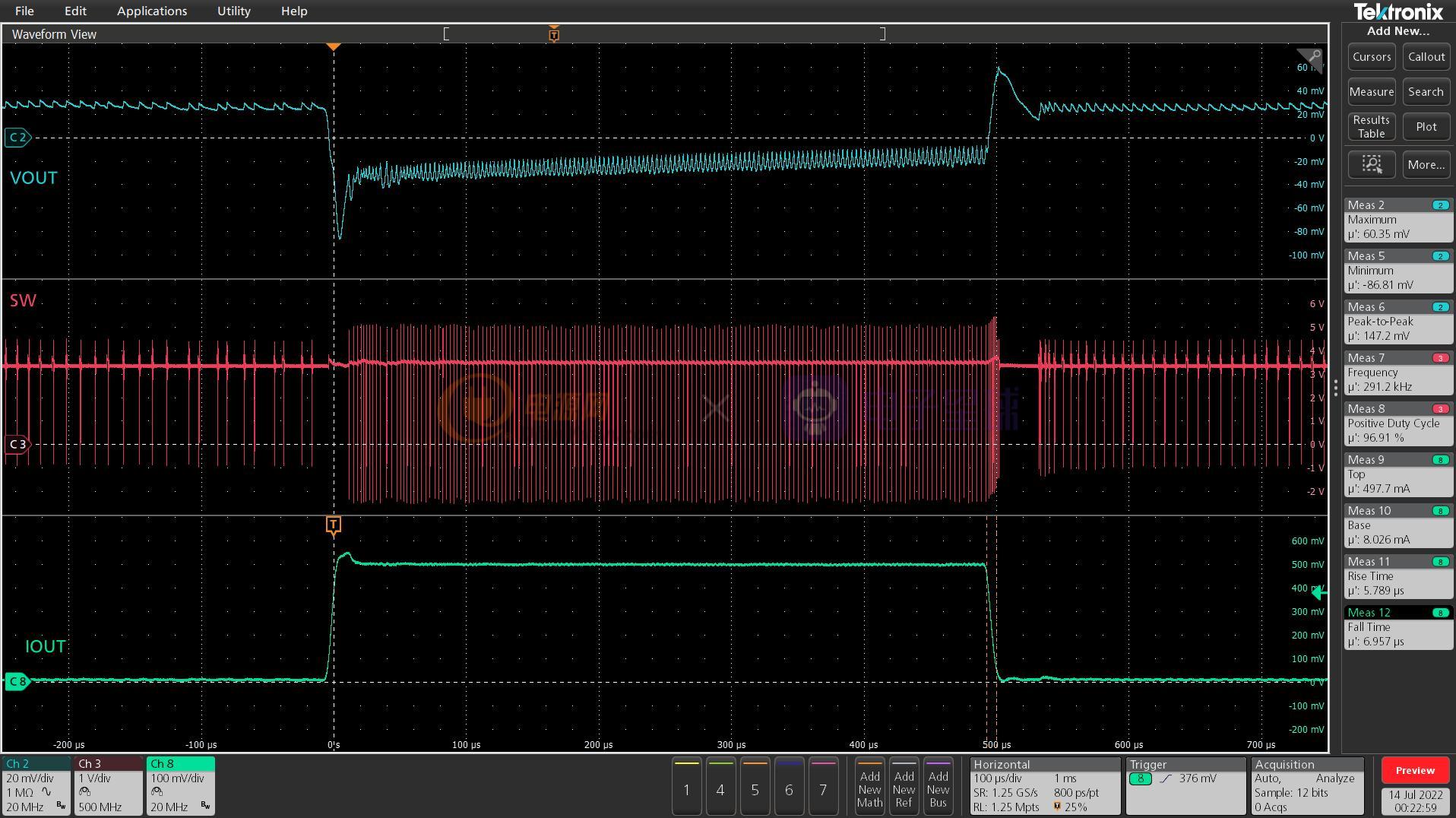
放大細節來看一下:
0-500mA加載恢復時間用了16us,電壓跌落達到了87mv,效果并沒有很驚艷。
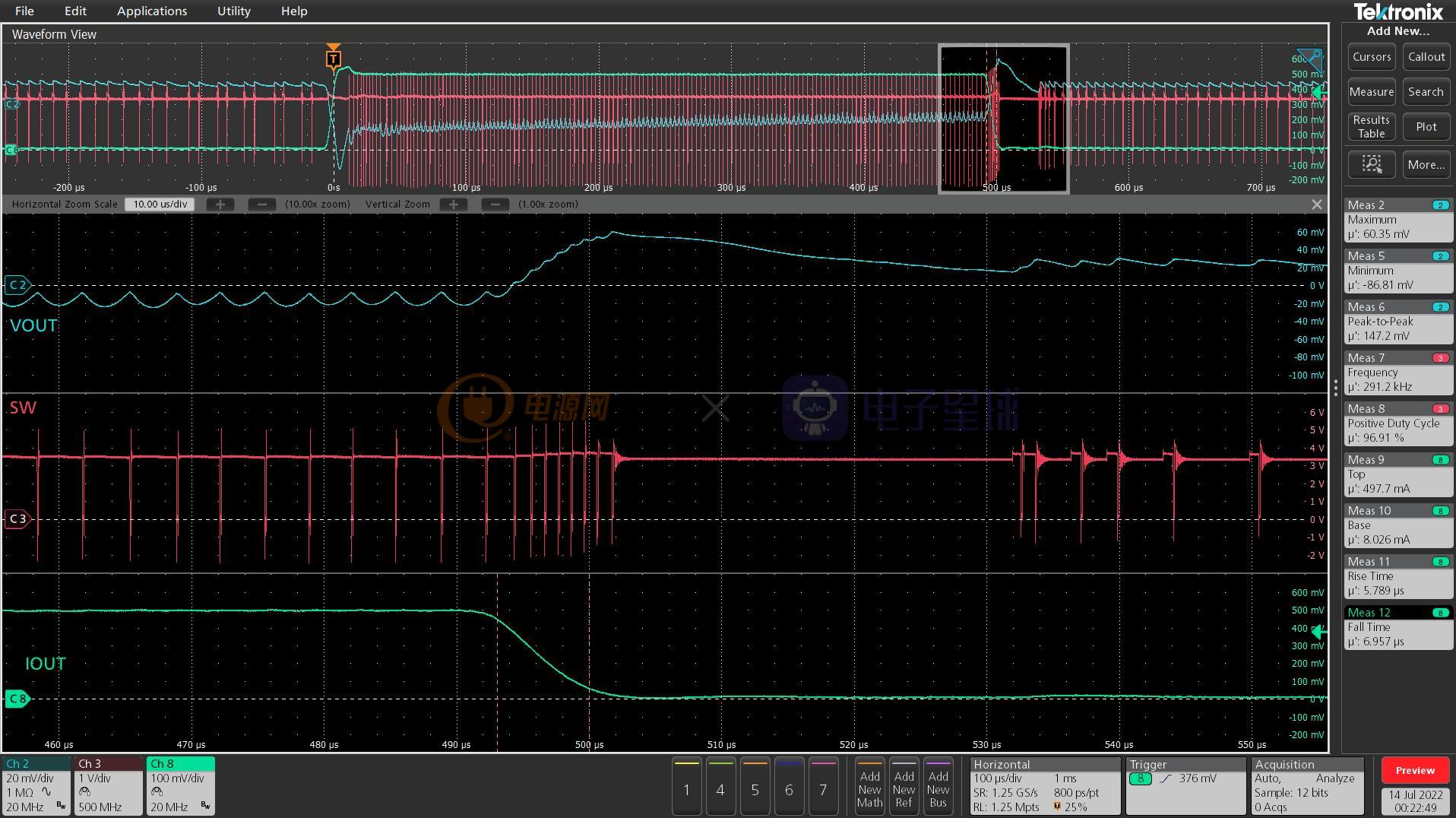
500mA-0mA減載恢復用了30us左右,電壓過沖60mV。
? 250-500mA 半載切滿載跳變測試

250mA和500mA buck均工作在CCM狀態,調整時間快了很多,均在10個us左右。


整體來看,消費級使用動態效果已經算是不錯的了。
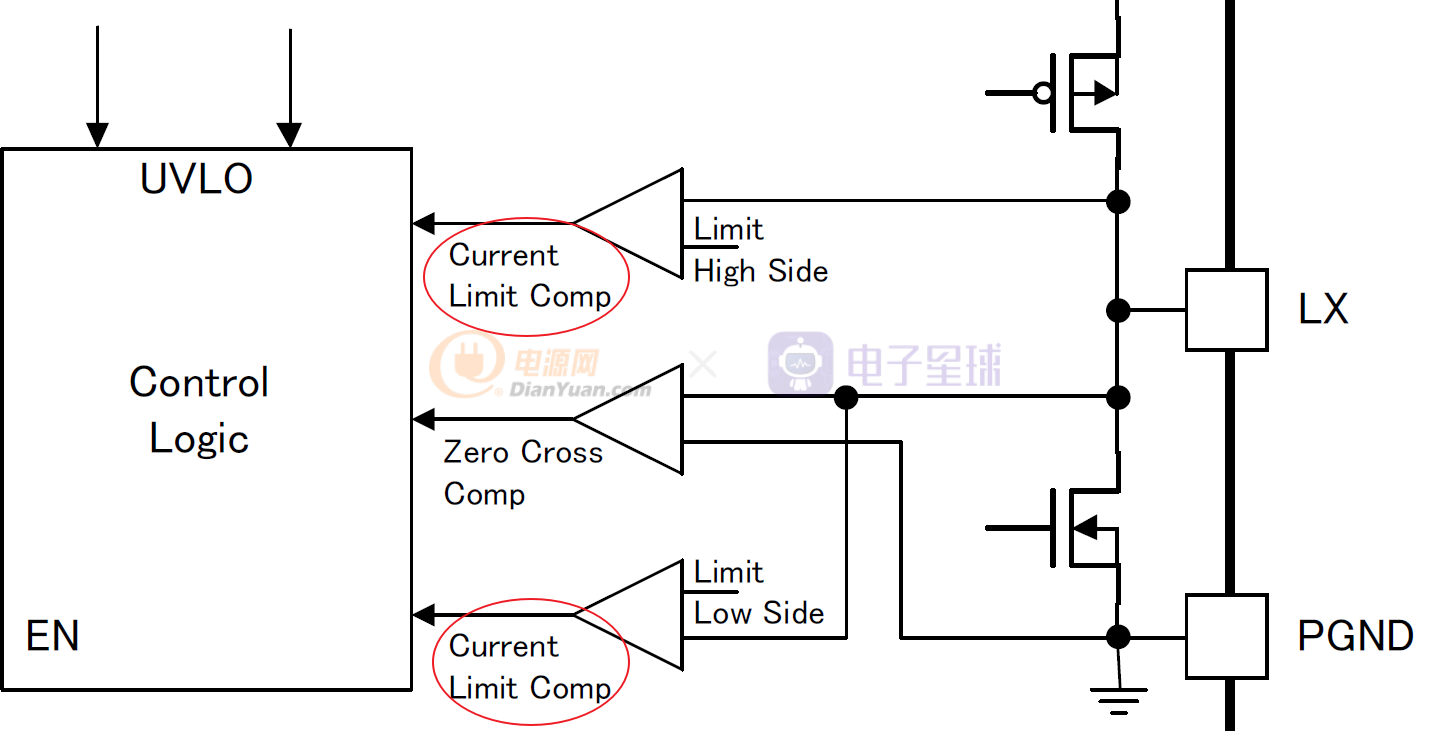
■ BUCK芯片輸出短路測試
最后來看看當輸出短路時,芯片會如何應對。
可以看到數出短路時電感電流最高沖到1.344A,從芯片內部來看,對buck上下管均進行了電流采樣,應該對上管和下管都設置了OCP限流點
■ BUCK芯片效率測試
測試設備采用Keysight 6位半精度雙通道SMU B2912,測試采用keysight上位機軟件Quick IV,設置Vin 3.6,4.2和5.5V三個點;Iout 設置10uA-0.5A 共200個點對數序列掃描。整個過程可以在幾分鐘內完成,另外設置測量速度為Long-10PLC盡量減小測量誤差。
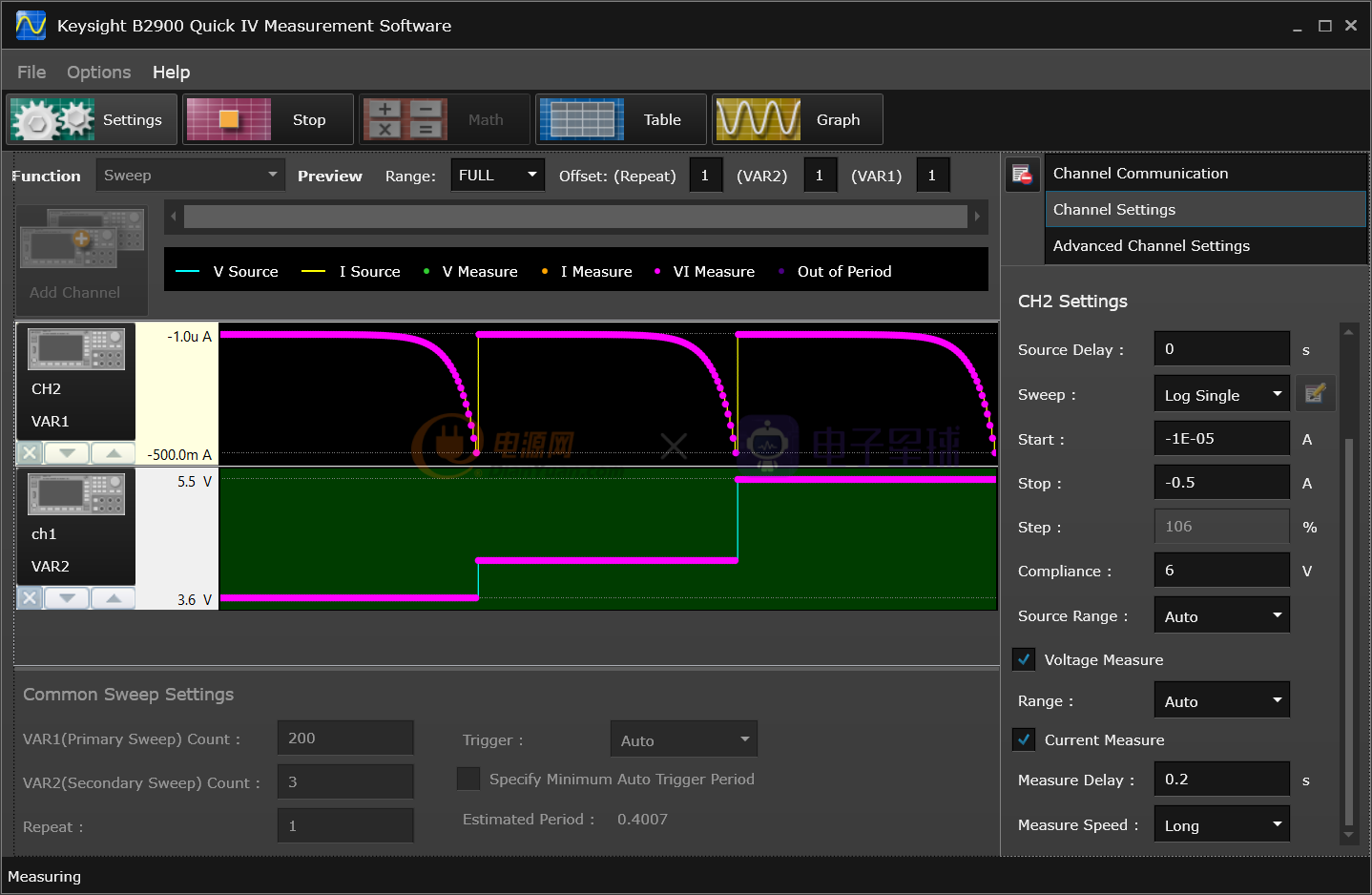
可以看到10uA負載基本上效率就已經上90%了,效率方面表現優異,最高效率點在3.6Vin 負載130mA左右,達到了97%。

■ BUCK芯片空載和shutdown關機電流
最后到了這顆芯片主打的低功耗測試,3.6Vin3.3Vout空載時僅有188nA輸入電流,將EN短路芯片shutdown測試輸入電流僅有6nA,納悶怎么shutdown電流只有6nA比規格書標稱的typ值小很多。
? 3.6Vin-3.3Vout 空載輸入電流

? 3.6Vin-EN接地shutdown時輸入電流

總體來看這顆芯片在IoT應用方面表現還是很不錯的,極低的空載和shutdown電流,極高的輕載效率,還算滿意的動態效果和表現優異的輸出ripple水平。
