gpio:通用輸入輸出接口
gpio管腳:一個io管腳,這個管腳可以有多個配置。在庫函數中用GPIO_Pin_1這樣的宏定義表示
gpio端口(gpio分組):一組gpio管腳的信息。在庫函數中用宏定義GPIOA GPIOB等表示
1 gpio庫說明
庫文件名:stm32f4xx_gpio.c
文檔提示翻譯:
如何使用這個驅動
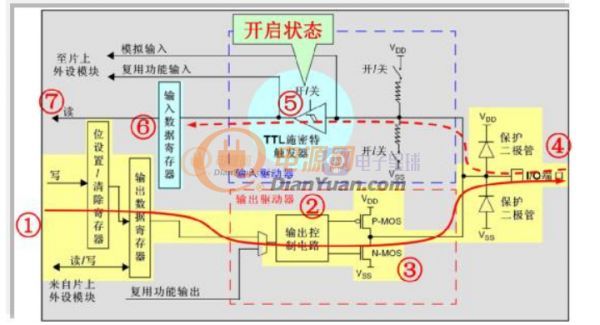
(2) 使用GPIO_Init()函數對每個引腳進行四種可能的配置
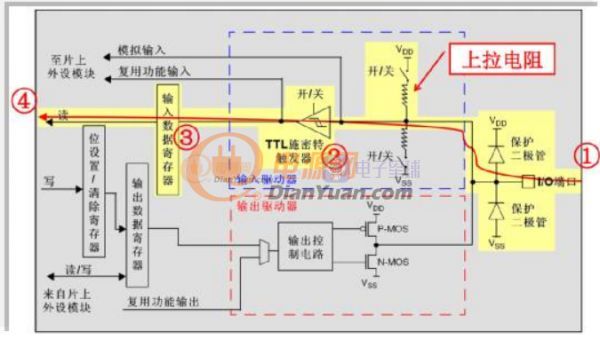
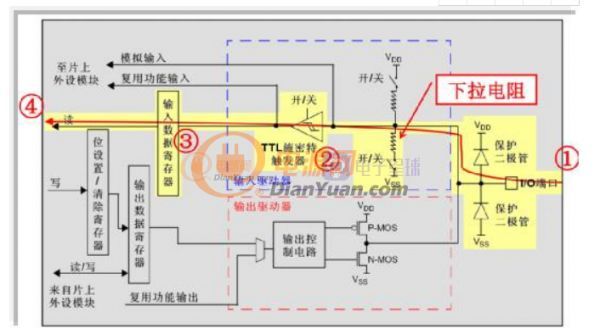
《1》 輸入狀態:Floating(浮空), Pull-up(上拉), Pull-down(下拉)
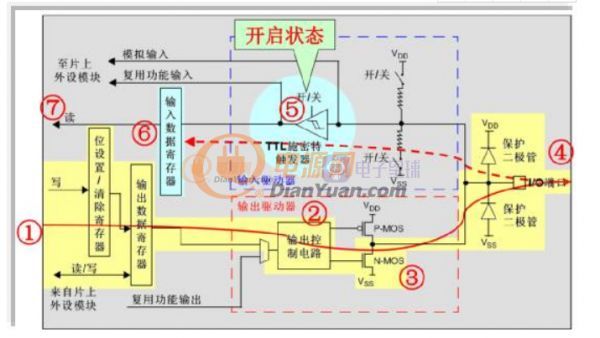
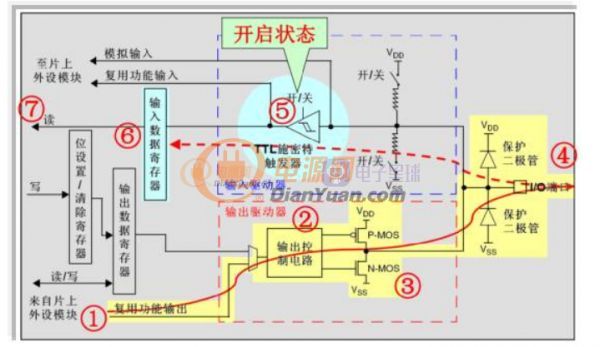
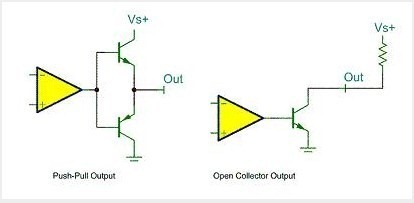
《2》 輸出狀態:Push-Pull (上拉下拉)(Pull-up(上拉), Pull-down(下拉) or no Pull(不上拉也不下拉)),Open Drain(開漏) (Pull-up(上拉), Pull-down(下拉) or no Pull(不上拉也不下拉)),在輸出模式,速度配置成2MHZ,25MHZ,50MHZ和100MHZ.
《3》 第二功能:上拉下拉和開漏
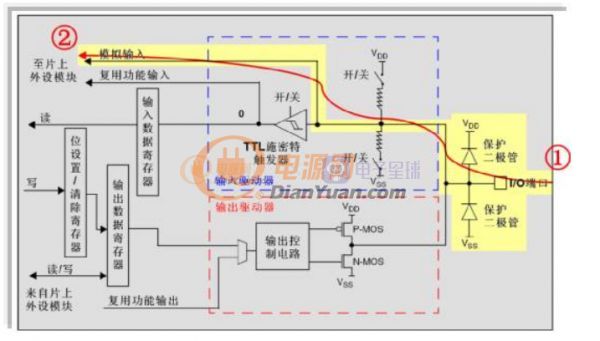
《4》 模擬:當一個管腳被用作ADC通道或者DAC輸出的時候,需要配置成此模式
(3) 外設的第二功能:
《1》 在ADC和DAC模式,使用GPIO_InitStruct->GPIO_Mode = GPIO_Mode_AN把需要的管腳配置成模擬模式
《2》 對于其它的管腳(定時器,串口等):
l 使用GPIO_PinAFConfig()函數把管腳和需要的第二功能進行連接
l 使用GPIO_InitStruct->GPIO_Mode = GPIO_Mode_AF把需要的管腳配置成第二功能模式
l 通過成員變量GPIO_PuPd, GPIO_OType and GPIO_Speed選擇類型,上拉下拉和輸出速度
l 調用函數GPIO_Init()
(4) 在輸入模式,使用函數GPIO_ReadInputDataBit()得到配置好管腳的電平
(5) 在輸出模式,使用函數GPIO_SetBits()/GPIO_ResetBits()設置配置好IO的高低電平
(6) 在復位過程和剛剛復位后,第二功能是無效的,GPIO被配置成了輸入浮空模式(JTAG管腳除外)
(7) 當LSE振蕩器關閉的時候,LSE振蕩器管腳OSC32_IN和OSC32_OUT可以作為通過IO來使用(分別用PC14和PC15表示)。LSE的優先級高于GPIO函數
(8) 當HSE振蕩器關閉的時候,HSE振蕩器管腳OSC_IN和OSC_OUT可以作為通用IO(PH0,PH1)來使用。HSE的優先級高于GPIO函數。