在設計環路補償時,如果不清楚被控電路的模型或者沒有bode圖的話一般可以采用PID法來補償。用仿真驗證了一下,PID補償法確實可以很方便的實現補償不過存在幾個疑惑。
1、PID補償只是滿足了穩定和動態響應,其它特性不能清晰的顯現出來。
2、PID中的微分項D好像并不適合開關電源控制。
3、PI可以用于部分開關電源控制不過性能達不到最佳。
在設計環路補償時,如果不清楚被控電路的模型或者沒有bode圖的話一般可以采用PID法來補償。用仿真驗證了一下,PID補償法確實可以很方便的實現補償不過存在幾個疑惑。
1、PID補償只是滿足了穩定和動態響應,其它特性不能清晰的顯現出來。
2、PID中的微分項D好像并不適合開關電源控制。
3、PI可以用于部分開關電源控制不過性能達不到最佳。
PID補償雖然能提供+90度的相位補償但其會放大高頻噪聲,所以這種補償只適用于大慣性(雙極點)沒有高頻噪聲的場合。在數字開關電源控制中用的比較多的是PI型還有2P2Z(TypeⅡ)和3P3Z(TypeⅢ)等。
根據之前的實驗現象,當電路發生震蕩或者欠阻尼震蕩時可以通過震蕩周期和次數來判斷出當前的穿越頻率和相位余量,通過不斷調整穿越頻率點并結合當前已知的補償參數就可以推算出功率級電路的bode圖。
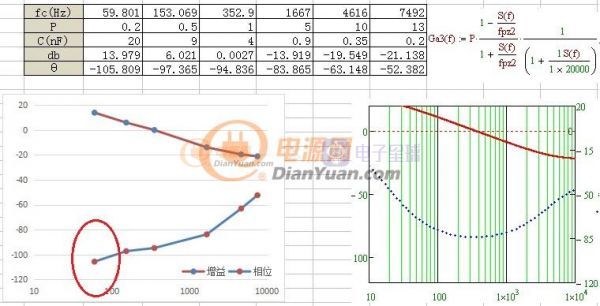
在實際電路中有很多情況下相位余量是大于90度的甚至接近180度(電流模式的反激),想讓電路在寬頻率范圍內都發生震蕩或欠阻尼震蕩顯然不太容易,所以設想一個補償環節可以使相位從0到-180度之間任意變化而增益恒為1。
右半平面零點后的增益是逆時針旋轉,左半平面極點后的增益是順時針旋轉,二者的相位都滯后0-90度,如果右零點、左極點重合則可以實現增益恒定而相位0-180變化的目的,見下圖:
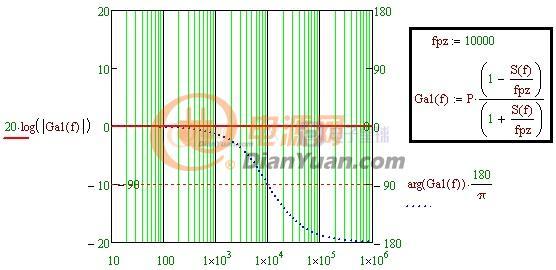
圖2-1 右半平面零點和左半平面極點重合bode圖
如圖2-1,可以任意改變頻率fpz從而調整環路的相位余量而不影響環路的增益曲線(穿越頻率不變),可以任意改變比例P從而調整環路的增益(改變穿越頻率)而不影響環路的相位曲線。這樣實現了相位和增益的分離使調試變的容易了。
圖2-1還存在兩個問題,
1、開關電源的輸出帶有開關噪聲,如果比例比較大則PWM發生器會飽和既發生大信號現象。
2、Boost或Buck-boost(反激)類的電路都存在右半平面零點,如果增益比較大則增益曲線不會過零(在開關頻率內),意味著穿越頻率將高于開關頻率。

圖2-2 右半平面零點限制了增益的提高
鑒于這兩個問題額外增加一個固定的高頻極點環節,這個高頻極點可取開關頻率的1/10或者低于功率級電路的右半平面零點。
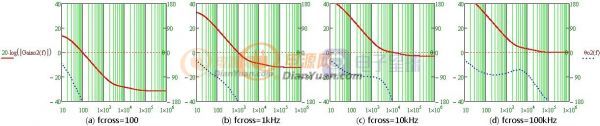
圖2-3 100-100kHz震蕩bode圖
如圖2-3總的開環bode圖頻率從100Hz-100kHz電路都可以發生震蕩具備了反相推導功率級bode圖的條件。
用Saber軟件對上述推論進行驗證,在驗證過程中發現當高增益時單個高頻極點慮不掉開關噪聲所以需要設置雙重極點(雙重極點20kHz,開關頻率60kHz,右半平面零點30kHz),仿真和計算的結果對比如下:
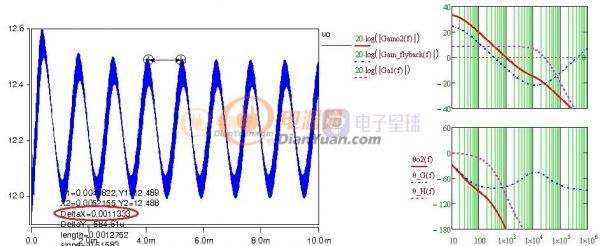
圖2-4-1 1kHz震蕩
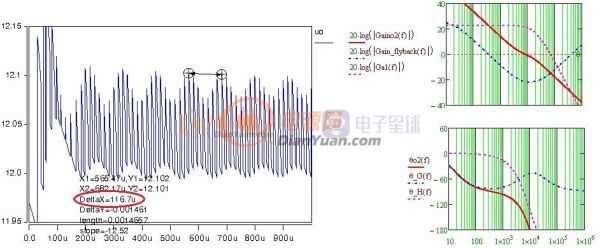
圖2-4-2 10kHz震蕩
在圖2-4-3中低頻段由于發生了次諧波震蕩導致出現較大偏差,當給電路加入斜坡補償后偏差可以消除。
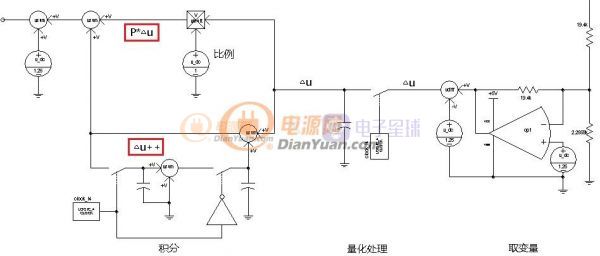
用壓控震蕩VCO作為控制器來搭建LLC電路如下:
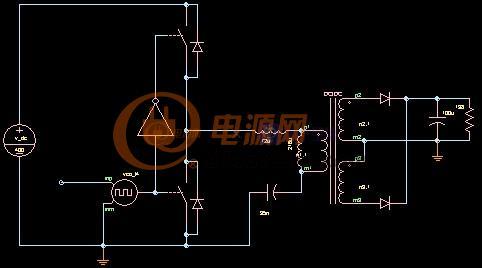
圖2-5-1 VCO控制的LLC電路
輸入:400V,匝比n=1,Lr=72uH,Lm=216uH,Cr=35nF,輸出電容Co=100uF,ESR=0.5,輸出電壓200V,輸出負載Ro=138歐姆。壓控振蕩器VCO的頻率變化范圍40kHz-160kHz。
同樣用上述電路來反推LLC得到的bode如下:

圖2-5-2 LLC功率級電路bode圖
圖2-5-2反推的bode圖是否準確?由于沒有LLC電路的小信號模型就直接采用tdsa掃頻來獲得bode圖并進行對比如下:
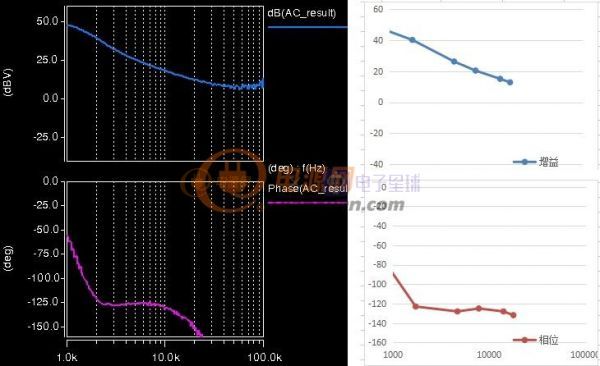
圖2-5-3 LLC電路兩種方法獲得的bode圖對比
圖2-5-3的對比顯示對于LLC電路反推法一樣適用。
有了功率級bode圖后剩下的補償就容易實現了,采用圖解法設置目標穿越頻率20kHz相位余量45度得出的Type Ⅲ型補償電路各參數如下:
R1=19.4kHz,R2=423,R3=830,C1=13nF,C2=306nF,C3=6.386nF。
動態波形仿真結果如下:

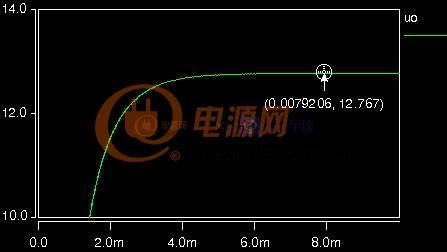
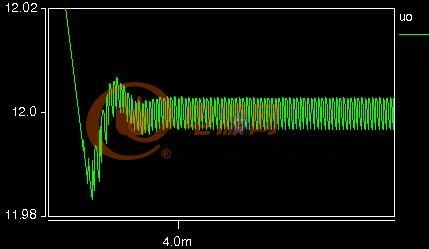
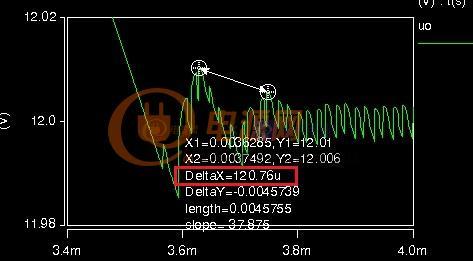
圖2-5-4 LLC動態波形(20kHz穿越頻率,45度相位余量)
圖2-5-4為LLC輸出動態波形及局部放大圖,在剛上電時為大信號狀態環路未起作用,后面當環路起作用后負載的動態特性較理想(負載138-1380歐姆0.01mS突變)。


OW5`O_6VUN2]}VRTS.png?x-oss-process=image/watermark,g_center,image_YXJ0aWNsZS9wdWJsaWMvd2F0ZXJtYXJrLnBuZz94LW9zcy1wcm9jZXNzPWltYWdlL3Jlc2l6ZSxQXzQwCg,t_20) 來占個位置,跟版主大人學習一下
來占個位置,跟版主大人學習一下