與傳統的模擬電源相比,數字電源的主要區別是控制與通信部分。在簡單易用、參數變更要求不多的應用場合,模擬電源產品更具優勢,因為其應用的針對性可以通過硬件固化來實現,而在可控因素較多、實時反應速度更快、需要多個模擬系統電源管理的、復雜的高性能系統應用中,數字電源則具有優勢。 數字電源發展現在越來越好,也越來越接近我們電源工程師了,但是在閉環控制中,多數用PID進行閉環控制,PID控制是通過參量Kp,Ti,Td起作用的,這3個參量大小不同,就是比例,積分,微分作用強弱的變化。
請高手出來討論如何整定這3個參量,個人對于這個不是很精通,但是感覺建模仿真是比較有效的手段,那我就先來討論下如何建模和具體步驟。。
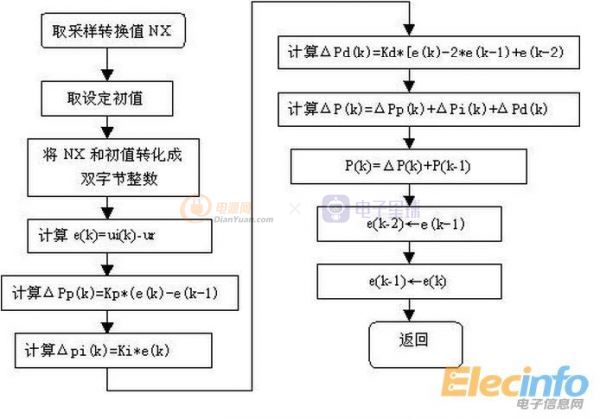
建模與仿真
PID控制器是目前在過程控制中應用最為普遍的控制器,它通常可以采用以下幾種形式:比例控制器,比例微分控制器,比例積分控制器,標準控制器。
下面通過一個例子來介紹PID控制器的設計過程。
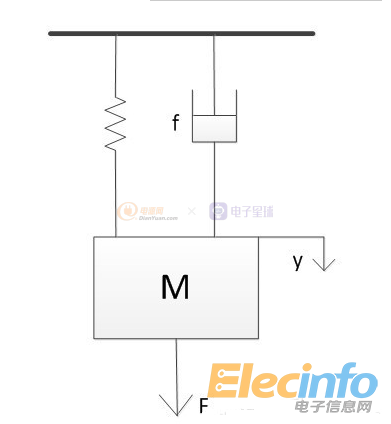
假設某彈簧(阻尼系統)如圖1所示,。讓我們來設計不同的P、PD、PI、PID校正裝置,構成反饋系統。來比較其優略。
系統需要滿足:
(1)較快的上升時間和過渡過程時間;
(2)較小的超調;
(3)無靜差。
下圖為彈簧阻尼系統
系統的模型可描述如下:
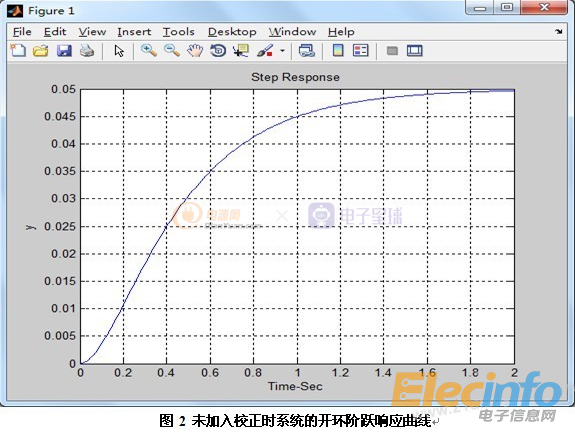
(1)、繪制未加入校正裝置的系統開環階躍響應曲線。
根據系統的開環傳遞函數,程序如下:
clear;
t=0:0.01:2;
num=1;
den=[1 10 20];
c=step(num,den,t);
plot(t,c);
xlabel('Time-Sec');
ylabel('y');
title('Step Response');
grid;
系統的階躍響應曲線如圖2

我們知道,增加可以降低靜態誤差,減少上升時間和過渡時間,因此首先選擇P校正,也就是加入一個比例放大器。此時,系統的閉環傳遞函數為: