
先說(shuō)明一下什么是最小相位系統(tǒng)和非最小相位系統(tǒng):
最小相位系統(tǒng):
傳遞函數(shù)在右半s平面內(nèi)既無(wú)極點(diǎn)也無(wú)零點(diǎn)
非最小相位系統(tǒng):
傳遞函數(shù)在右半s平面內(nèi)有極點(diǎn)和(或)零點(diǎn)
那位有“Feedback compensation design for switched mode power supplies with a right-half plane (RHP) zero”這篇文章發(fā)上來(lái)在下感激不禁
關(guān)于存在右半平面零點(diǎn)的環(huán)路設(shè)計(jì)
全部回復(fù)(19)
正序查看
倒序查看
 500) {this.resized=true; this.width=500; this.alt='這是一張縮略圖,點(diǎn)擊可放大。\n按住CTRL,滾動(dòng)鼠標(biāo)滾輪可自由縮放';this.style.cursor='hand'}" onclick="if(!this.resized) {return true;} else {window.open('http://u.dianyuan.com/bbs/u/48/1165495962.gif');}" onmousewheel="return imgzoom(this);">
500) {this.resized=true; this.width=500; this.alt='這是一張縮略圖,點(diǎn)擊可放大。\n按住CTRL,滾動(dòng)鼠標(biāo)滾輪可自由縮放';this.style.cursor='hand'}" onclick="if(!this.resized) {return true;} else {window.open('http://u.dianyuan.com/bbs/u/48/1165495962.gif');}" onmousewheel="return imgzoom(this);">
對(duì)于最小相位系統(tǒng),其傳遞函數(shù)由單一的幅值曲線唯一確定.對(duì)于非最小相位系統(tǒng)則不是這種情況
0
回復(fù)
 500) {this.resized=true; this.width=500; this.alt='這是一張縮略圖,點(diǎn)擊可放大。\n按住CTRL,滾動(dòng)鼠標(biāo)滾輪可自由縮放';this.style.cursor='hand'}" onclick="if(!this.resized) {return true;} else {window.open('http://u.dianyuan.com/bbs/u/48/1165498517.gif');}" onmousewheel="return imgzoom(this);">
500) {this.resized=true; this.width=500; this.alt='這是一張縮略圖,點(diǎn)擊可放大。\n按住CTRL,滾動(dòng)鼠標(biāo)滾輪可自由縮放';this.style.cursor='hand'}" onclick="if(!this.resized) {return true;} else {window.open('http://u.dianyuan.com/bbs/u/48/1165498517.gif');}" onmousewheel="return imgzoom(this);"> 0
回復(fù)
@nansir
[圖片]500){this.resized=true;this.width=500;this.alt='這是一張縮略圖,點(diǎn)擊可放大。\n按住CTRL,滾動(dòng)鼠標(biāo)滾輪可自由縮放';this.style.cursor='hand'}"onclick="if(!this.resized){returntrue;}else{window.open('http://u.dianyuan.com/bbs/u/48/1165498517.gif');}"onmousewheel="returnimgzoom(this);">
繼續(xù)!!!
0
回復(fù)
 500) {this.resized=true; this.width=500; this.alt='這是一張縮略圖,點(diǎn)擊可放大。\n按住CTRL,滾動(dòng)鼠標(biāo)滾輪可自由縮放';this.style.cursor='hand'}" onclick="if(!this.resized) {return true;} else {window.open('http://u.dianyuan.com/bbs/u/48/1165590478.gif');}" onmousewheel="return imgzoom(this);">
500) {this.resized=true; this.width=500; this.alt='這是一張縮略圖,點(diǎn)擊可放大。\n按住CTRL,滾動(dòng)鼠標(biāo)滾輪可自由縮放';this.style.cursor='hand'}" onclick="if(!this.resized) {return true;} else {window.open('http://u.dianyuan.com/bbs/u/48/1165590478.gif');}" onmousewheel="return imgzoom(this);"> 0
回復(fù)
 500) {this.resized=true; this.width=500; this.alt='這是一張縮略圖,點(diǎn)擊可放大。\n按住CTRL,滾動(dòng)鼠標(biāo)滾輪可自由縮放';this.style.cursor='hand'}" onclick="if(!this.resized) {return true;} else {window.open('http://u.dianyuan.com/bbs/u/48/1165630648.gif');}" onmousewheel="return imgzoom(this);">
500) {this.resized=true; this.width=500; this.alt='這是一張縮略圖,點(diǎn)擊可放大。\n按住CTRL,滾動(dòng)鼠標(biāo)滾輪可自由縮放';this.style.cursor='hand'}" onclick="if(!this.resized) {return true;} else {window.open('http://u.dianyuan.com/bbs/u/48/1165630648.gif');}" onmousewheel="return imgzoom(this);"> 0
回復(fù)
 500) {this.resized=true; this.width=500; this.alt='這是一張縮略圖,點(diǎn)擊可放大。\n按住CTRL,滾動(dòng)鼠標(biāo)滾輪可自由縮放';this.style.cursor='hand'}" onclick="if(!this.resized) {return true;} else {window.open('http://u.dianyuan.com/bbs/u/48/1165718362.gif');}" onmousewheel="return imgzoom(this);">
500) {this.resized=true; this.width=500; this.alt='這是一張縮略圖,點(diǎn)擊可放大。\n按住CTRL,滾動(dòng)鼠標(biāo)滾輪可自由縮放';this.style.cursor='hand'}" onclick="if(!this.resized) {return true;} else {window.open('http://u.dianyuan.com/bbs/u/48/1165718362.gif');}" onmousewheel="return imgzoom(this);"> 0
回復(fù)
@nansir
[圖片]500){this.resized=true;this.width=500;this.alt='這是一張縮略圖,點(diǎn)擊可放大。\n按住CTRL,滾動(dòng)鼠標(biāo)滾輪可自由縮放';this.style.cursor='hand'}"onclick="if(!this.resized){returntrue;}else{window.open('http://u.dianyuan.com/bbs/u/48/1165718362.gif');}"onmousewheel="returnimgzoom(this);">
哦,剛才看過(guò),A2中-1/L項(xiàng)應(yīng)該沒(méi)有“-”號(hào)
0
回復(fù)
 500) {this.resized=true; this.width=500; this.alt='這是一張縮略圖,點(diǎn)擊可放大。\n按住CTRL,滾動(dòng)鼠標(biāo)滾輪可自由縮放';this.style.cursor='hand'}" onclick="if(!this.resized) {return true;} else {window.open('http://u.dianyuan.com/bbs/u/48/1165734122.gif');}" onmousewheel="return imgzoom(this);">
500) {this.resized=true; this.width=500; this.alt='這是一張縮略圖,點(diǎn)擊可放大。\n按住CTRL,滾動(dòng)鼠標(biāo)滾輪可自由縮放';this.style.cursor='hand'}" onclick="if(!this.resized) {return true;} else {window.open('http://u.dianyuan.com/bbs/u/48/1165734122.gif');}" onmousewheel="return imgzoom(this);"> 0
回復(fù)
@nansir
[圖片]500){this.resized=true;this.width=500;this.alt='這是一張縮略圖,點(diǎn)擊可放大。\n按住CTRL,滾動(dòng)鼠標(biāo)滾輪可自由縮放';this.style.cursor='hand'}"onclick="if(!this.resized){returntrue;}else{window.open('http://u.dianyuan.com/bbs/u/48/1165734122.gif');}"onmousewheel="returnimgzoom(this);">
這樣子搞看著好累丫.
0
回復(fù)
@nansir
由于存在右半平面零點(diǎn),幅頻曲線以20db上升時(shí),相位缺滯后45度,所以一個(gè)設(shè)計(jì)原則是當(dāng)幅頻曲線穿越0db一定要在右半平面零點(diǎn)以前.選擇合適的電容以使ESR造成的零點(diǎn)和右半平面零點(diǎn)發(fā)生在雙極點(diǎn)以后
我剛接觸環(huán)路設(shè)計(jì),頭都快大了,還望大哥多多指教
我做的基于單周期控制的BOOT PFC 電路,現(xiàn)在輸出電壓隨輸入電壓 改變而改變,穩(wěn)不下來(lái).
電路工作在CCM模式,所以存在右半平面零點(diǎn).開(kāi)關(guān)頻率50K,1000uf的電解電容濾波,pi誤差放大.
不知截止頻率選在多少合適?
我做的基于單周期控制的BOOT PFC 電路,現(xiàn)在輸出電壓隨輸入電壓 改變而改變,穩(wěn)不下來(lái).
電路工作在CCM模式,所以存在右半平面零點(diǎn).開(kāi)關(guān)頻率50K,1000uf的電解電容濾波,pi誤差放大.
不知截止頻率選在多少合適?
0
回復(fù)
@zzjh
我剛接觸環(huán)路設(shè)計(jì),頭都快大了,還望大哥多多指教我做的基于單周期控制的BOOTPFC電路,現(xiàn)在輸出電壓隨輸入電壓改變而改變,穩(wěn)不下來(lái).電路工作在CCM模式,所以存在右半平面零點(diǎn).開(kāi)關(guān)頻率50K,1000uf的電解電容濾波,pi誤差放大.不知截止頻率選在多少合適?
指教談不上,我對(duì)單周期控制不太了解
首先,從主電路設(shè)計(jì)上應(yīng)該保證電路能工作在你所設(shè)計(jì)的目標(biāo)值,BOOT電路占空比不能大于0.8,你先看看升壓比是不是太大
BOOST變換器的右半平面零點(diǎn)在R×(1-D)2/L處,要根據(jù)負(fù)載選取電感L值一定保證它在兩極點(diǎn)以后
一般講截至頻率設(shè)計(jì)成開(kāi)關(guān)頻率的1/4-1/5左右
首先,從主電路設(shè)計(jì)上應(yīng)該保證電路能工作在你所設(shè)計(jì)的目標(biāo)值,BOOT電路占空比不能大于0.8,你先看看升壓比是不是太大
BOOST變換器的右半平面零點(diǎn)在R×(1-D)2/L處,要根據(jù)負(fù)載選取電感L值一定保證它在兩極點(diǎn)以后
一般講截至頻率設(shè)計(jì)成開(kāi)關(guān)頻率的1/4-1/5左右
0
回復(fù)
@nansir
指教談不上,我對(duì)單周期控制不太了解首先,從主電路設(shè)計(jì)上應(yīng)該保證電路能工作在你所設(shè)計(jì)的目標(biāo)值,BOOT電路占空比不能大于0.8,你先看看升壓比是不是太大BOOST變換器的右半平面零點(diǎn)在R×(1-D)2/L處,要根據(jù)負(fù)載選取電感L值一定保證它在兩極點(diǎn)以后一般講截至頻率設(shè)計(jì)成開(kāi)關(guān)頻率的1/4-1/5左右
 500) {this.resized=true; this.width=500; this.alt='這是一張縮略圖,點(diǎn)擊可放大。\n按住CTRL,滾動(dòng)鼠標(biāo)滾輪可自由縮放';this.style.cursor='hand'}" onclick="if(!this.resized) {return true;} else {window.open('http://u.dianyuan.com/bbs/u/48/1166174990.png');}" onmousewheel="return imgzoom(this);">
500) {this.resized=true; this.width=500; this.alt='這是一張縮略圖,點(diǎn)擊可放大。\n按住CTRL,滾動(dòng)鼠標(biāo)滾輪可自由縮放';this.style.cursor='hand'}" onclick="if(!this.resized) {return true;} else {window.open('http://u.dianyuan.com/bbs/u/48/1166174990.png');}" onmousewheel="return imgzoom(this);">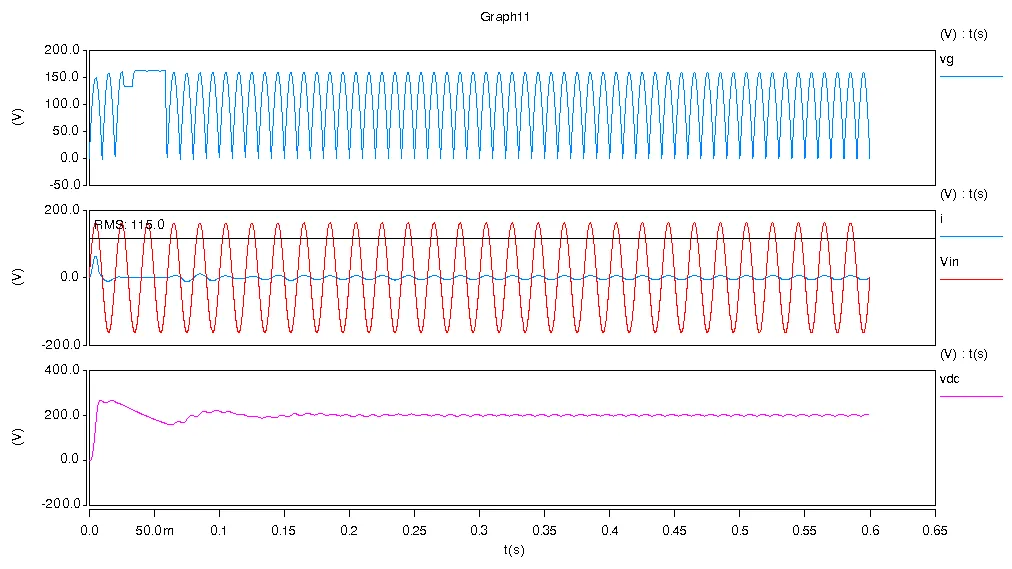 500) {this.resized=true; this.width=500; this.alt='這是一張縮略圖,點(diǎn)擊可放大。\n按住CTRL,滾動(dòng)鼠標(biāo)滾輪可自由縮放';this.style.cursor='hand'}" onclick="if(!this.resized) {return true;} else {window.open('http://u.dianyuan.com/bbs/u/48/1166174998.png');}" onmousewheel="return imgzoom(this);">
500) {this.resized=true; this.width=500; this.alt='這是一張縮略圖,點(diǎn)擊可放大。\n按住CTRL,滾動(dòng)鼠標(biāo)滾輪可自由縮放';this.style.cursor='hand'}" onclick="if(!this.resized) {return true;} else {window.open('http://u.dianyuan.com/bbs/u/48/1166174998.png');}" onmousewheel="return imgzoom(this);"> 0
回復(fù)
@nansir
指教談不上,我對(duì)單周期控制不太了解首先,從主電路設(shè)計(jì)上應(yīng)該保證電路能工作在你所設(shè)計(jì)的目標(biāo)值,BOOT電路占空比不能大于0.8,你先看看升壓比是不是太大BOOST變換器的右半平面零點(diǎn)在R×(1-D)2/L處,要根據(jù)負(fù)載選取電感L值一定保證它在兩極點(diǎn)以后一般講截至頻率設(shè)計(jì)成開(kāi)關(guān)頻率的1/4-1/5左右
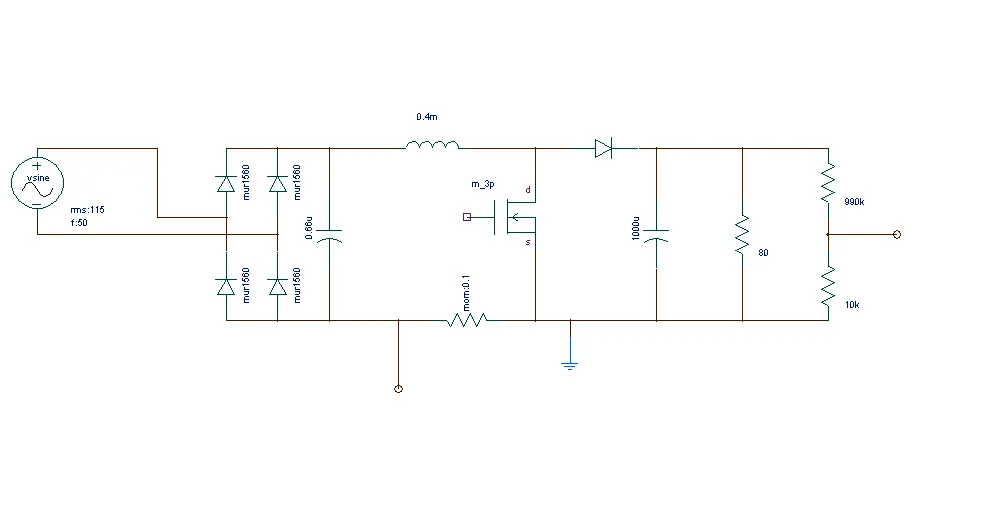
這是主電路拓?fù)浜头抡娼Y(jié)果(非常理想)
Vin=115V;
Vdc=200V;
RL=80;
L=0.4mH
我現(xiàn)在調(diào)出的波形都挺理想,就是電壓沒(méi)有真正的閉環(huán),輸出特性不硬.
因?yàn)閎oost輸入端不是很平的直流,而是經(jīng)過(guò)整流后的饅頭波Vg.所以,每個(gè)電源周期,占空比都是變化的.
不知你說(shuō)的兩極點(diǎn)指的是什么?怎么計(jì)算啊.
Vin=115V;
Vdc=200V;
RL=80;
L=0.4mH
我現(xiàn)在調(diào)出的波形都挺理想,就是電壓沒(méi)有真正的閉環(huán),輸出特性不硬.
因?yàn)閎oost輸入端不是很平的直流,而是經(jīng)過(guò)整流后的饅頭波Vg.所以,每個(gè)電源周期,占空比都是變化的.
不知你說(shuō)的兩極點(diǎn)指的是什么?怎么計(jì)算啊.
0
回復(fù)
@zzjh
這是主電路拓?fù)浜头抡娼Y(jié)果(非常理想)Vin=115V;Vdc=200V;RL=80;L=0.4mH我現(xiàn)在調(diào)出的波形都挺理想,就是電壓沒(méi)有真正的閉環(huán),輸出特性不硬.因?yàn)閎oost輸入端不是很平的直流,而是經(jīng)過(guò)整流后的饅頭波Vg.所以,每個(gè)電源周期,占空比都是變化的.不知你說(shuō)的兩極點(diǎn)指的是什么?怎么計(jì)算啊.
單周期控制是一種大信號(hào)非線性控制技術(shù).通過(guò)控制開(kāi)關(guān)的占空比以使在每周中開(kāi)關(guān)變換器的開(kāi)關(guān)變量的平均值在靜態(tài)或瞬態(tài)時(shí)等于參考信號(hào)或與控制參考成比例.不知道你的控制是怎么實(shí)現(xiàn)的,如果類似與BUCK電路的控制肯定是不穩(wěn)定的,因?yàn)閎uck電路的M與D成正比,但boost電路的M與1/(1-D)成正比,關(guān)鍵是看你的積分器是取的什么變量與參考電壓比較的
0
回復(fù)
