0 引言
同步機(jī)正余弦旋轉(zhuǎn)變壓器等廣泛應(yīng)用于火力控制,航空航天、自動(dòng)控制等領(lǐng)域以實(shí)現(xiàn)系統(tǒng)間軸角信息的傳輸,由于計(jì)算機(jī)技術(shù)在上述領(lǐng)域的廣泛應(yīng)用,數(shù)字-軸角轉(zhuǎn)換已(Digitalto Shaft-angle Converting,DSC)成為一個(gè)重要的問題。市場(chǎng)上DSC集成模塊產(chǎn)品價(jià)格較高且接口不夠靈活,在某些領(lǐng)域應(yīng)用受到限制,特別在多路DSC使用時(shí)效費(fèi)問題更為突出。基于上述問題,提出一種采用ARM 單片機(jī)+CPLD實(shí)現(xiàn)數(shù)字-軸角轉(zhuǎn)換的方法。
1 數(shù)字-軸角轉(zhuǎn)換原理
數(shù)字-軸角轉(zhuǎn)換(DSC)是將數(shù)字形式表示的軸角度θ通過運(yùn)算電路轉(zhuǎn)換為正余弦旋轉(zhuǎn)變壓器形式的電壓,經(jīng)正余弦旋轉(zhuǎn)變壓器和經(jīng)過Scott變壓器后驅(qū)動(dòng)同步機(jī)指向?qū)?yīng)軸角位置,從而完成數(shù)字-軸角轉(zhuǎn)換。
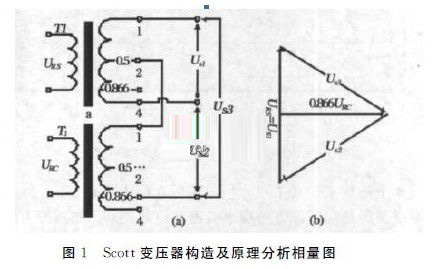
為了將兩相正余弦旋轉(zhuǎn)變壓器信號(hào)變?yōu)槿嗤綑C(jī)信號(hào),需使用Scott變壓器.其基本構(gòu)造及原理分析如圖1所示。
2 硬件設(shè)計(jì)
2.1 總體設(shè)計(jì)
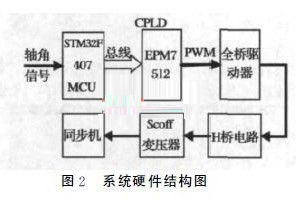
以一路DSC為例,系統(tǒng)的硬件結(jié)構(gòu)如圖2所示,工作原理為:STM32F407微控制器為主控芯片,通過通信接口接收外部輸入的軸角信號(hào)θ,并對(duì)其進(jìn)行粗精分離及利用查表法計(jì)算對(duì)應(yīng)占空比大小,通過總線方式將通道對(duì)應(yīng)地址及占空比對(duì)應(yīng)數(shù)據(jù)信息送入CPLD;CPLD根據(jù)數(shù)據(jù)及地址信息產(chǎn)生對(duì)應(yīng)通道和占空比的PWM 信號(hào);由4個(gè)互補(bǔ)MOS管構(gòu)成的全橋驅(qū)動(dòng)電路由全橋驅(qū)動(dòng)器UBA2032根據(jù)PWM 信號(hào)控制全橋電路開斷,并經(jīng)選頻電路后產(chǎn)生對(duì)應(yīng)軸角的調(diào)制波,經(jīng)Scott變壓器轉(zhuǎn)變?yōu)槿嘈盘?hào)后驅(qū)動(dòng)同步機(jī)指向?qū)?yīng)軸角位置即完成系統(tǒng)的數(shù)字-軸角轉(zhuǎn)換。
2.2 STM32F4微控制器
STM32F4微控制器是由意法半導(dǎo)體生產(chǎn)的基于ARMCortex-M4內(nèi)核的新型微控制器,性能優(yōu)越.下面主要說明選用此型號(hào)MCU的原因:
(1)內(nèi)核架構(gòu)先進(jìn),性能優(yōu)越.由于MCU需要完成諸如軸角粗精分離,取整以及調(diào)制波對(duì)應(yīng)PWM 信號(hào)占空比等運(yùn)算,涉及到較多乘除法運(yùn)算,要求所選MCU需具備較強(qiáng)浮點(diǎn)及乘除運(yùn)算能力,而所選STM32F4微控制器具有專門的硬件乘法器和具有較高的主頻(168MHz),且可適當(dāng)超頻,適合完成較為復(fù)雜的實(shí)時(shí)運(yùn)算;(2)接口豐富,可方便完成功能擴(kuò)展.RS232串口用于接收外部信息,同時(shí),此型號(hào)MCU具有網(wǎng)絡(luò)接口,可在系統(tǒng)組網(wǎng)時(shí)作為網(wǎng)絡(luò)節(jié)點(diǎn);(3)可變靜態(tài)存儲(chǔ)控制器(FSMC),是STM32系列采用的一種新型的存儲(chǔ)器擴(kuò)展技術(shù),可根據(jù)不同的外部存儲(chǔ)器類型通過設(shè)置進(jìn)而匹配信號(hào)的速度,達(dá)到方便擴(kuò)展。使用靈活的目的,系統(tǒng)中通過數(shù)據(jù)/地址/控制三總線方式與CPLD通信。
在多路DSC中,通過地址總線傳遞所選通道號(hào),數(shù)據(jù)總線傳遞對(duì)應(yīng)此通道相應(yīng)軸角調(diào)制波的PWM 信號(hào)的占空比,控制總線傳遞相應(yīng)控制信號(hào)。
3 軟件設(shè)計(jì)
系統(tǒng)主要分為軸角粗精角度分離取整,占空比計(jì)算以及PWM 信號(hào)生成三部分。
3.1 軸角粗精分離設(shè)粗精同步機(jī)系統(tǒng)表示的軸角為θ,根據(jù)粗精傳動(dòng)比例k將其分為精確同步機(jī)軸角度θ精和概略同步機(jī)軸角度θ粗,這一過程稱為軸角粗精角度分離。
3.2 查表法計(jì)算占空比根據(jù)公式(1),以正弦調(diào)制波為例,其輸出式子為:
URS = KRUmsinωtsinθ,PWM 波形頻率為f1 =20kHz,DSC角度更新速率為f2 =50Hz,因此在每個(gè)調(diào)制波周期內(nèi)有N1 =f1/f2=400個(gè)PWM信號(hào).CPLD采用時(shí)鐘計(jì)數(shù).CPLD采用時(shí)鐘計(jì)數(shù)方法產(chǎn)生不同占空比的PWM 信號(hào),由于CPLD的時(shí)鐘頻率為f3 =32.768 MHz,因此產(chǎn)生20kHz的PWM 信號(hào)時(shí),最大計(jì)數(shù)值為N2 =f3/f1=1638,以中間數(shù)值為零值點(diǎn),即為Z0 =819。
4 結(jié)束語
設(shè)計(jì)了一種以ARM Cortex-M4內(nèi)核的新型STM32F4微控制器和可編程邏輯器件CPLD為核心的數(shù)字-軸角轉(zhuǎn)換系統(tǒng)。利用PWM信號(hào)控制全橋橋電路提供大功率輸出,進(jìn)而驅(qū)動(dòng)同步機(jī)指向?qū)?yīng)軸角,經(jīng)高炮系統(tǒng)控制實(shí)驗(yàn)驗(yàn)證,該系統(tǒng)運(yùn)轉(zhuǎn)平穩(wěn),效率高,改進(jìn)了原系統(tǒng)功耗較高,發(fā)熱量大的缺點(diǎn),且具有較高精度及效費(fèi)比,實(shí)測(cè)靜態(tài)轉(zhuǎn)換誤差小于0.5密位(20:1粗精組合),達(dá)到實(shí)際要求,為其它數(shù)字-軸角轉(zhuǎn)換系統(tǒng)實(shí)現(xiàn)提供了一種新的方法,具有一定推廣價(jià)值。
聲明:本內(nèi)容為作者獨(dú)立觀點(diǎn),不代表電源網(wǎng)。本網(wǎng)站原創(chuàng)內(nèi)容,如需轉(zhuǎn)載,請(qǐng)注明出處;本網(wǎng)站轉(zhuǎn)載的內(nèi)容(文章、圖片、視頻)等資料版權(quán)歸原作者所有。如我們采用了您不宜公開的文章或圖片,未能及時(shí)和您確認(rèn),避免給雙方造成不必要的經(jīng)濟(jì)損失,請(qǐng)電郵聯(lián)系我們,以便迅速采取適當(dāng)處理措施;歡迎投稿,郵箱∶editor@netbroad.com。
| 微信關(guān)注 | ||
 |
| 技術(shù)專題 | 更多>> | |
 |
| 技術(shù)專題之EMC |
 |
| 技術(shù)專題之PCB |



| 電子行業(yè)原創(chuàng)技術(shù)內(nèi)容推薦 | |
 |



互聯(lián)網(wǎng)違法不良信息舉報(bào)
Reporting Internet Illegal and Bad Information editor@netbroad.com
editor@netbroad.com
 400-003-2006
400-003-2006